Votre panier
Il n'y a plus de produit dans votre panier- Capteurs et Cartes programmables
- Cartes programmables
- Cartes Arduino® officielles
- Cartes compatibles Arduino®
- Cartes micro:bit
- Cartes Pi Pico et RP2040
- Digilent
- Mikroelektronika
- OpenMV
- Soldered
- Teensy
- Cartes E-Textile
- Vittascience
- M5Stack
- Espruino
- Pyboard - MicroPython
- Cartes Bare Conductive
- JoC - Javaino
- mbed / Nucleo
- LCD 4D Systems
- Trenz Electronic
- Interfaces Android
- CUBLOC
- PICBASIC
- TinyPLC
- Arcades consoles
- neuron
- Cartes cœur Linux
- Modules IOT
- Capteurs - Prototypage
- Systèmes Radiofréquences
- Cartes programmables
- Robotique Imprimantes 3D
- Bases robotiques
- Pièces mécaniques
- Roues et chenilles
- Roues libres - Roulettes
- Profilés MakerBeam
- Profilés MakerBeam XS
- Profilés MakerBeam XL
- Profilés OpenBeam
- Gamme ACRZilla
- Profilés Makeblock
- Plaques et supports
- Visseries et entretoises
- Courroies et poulies
- Chaînes - Roues dentées
- Pignons
- Arbres - Roulements
- Mouvement rectiligne non motorisé
- Structures diverses
- Accessoires pneumatiques
- Moteurs et actionneurs
- Commande et contrôleurs
- Imprimantes 3D / CNC
- Capteurs
- Mesure et interfaces
- Composants electroniques
- Composants
- Optoélectronique
- Leds de 1.8 mm à 20 mm
- Flexibles leds filaments
- Leds infrarouges
- Leds de puissance
- Leds NeoPixel adressables
- Rubans Leds
- Supports de led
- Bargraphes à Leds
- Matrices à Leds standards
- Matrices à Leds séries
- 7 segments standards
- 7 segments séries
- Circuits commande de leds
- Voyants
- Ampoules et lucioles
- Photorésistances LDR
- Optocoupleurs
- Afficheurs LCD
- Afficheurs LCD graphiques
- Accessoires pour LCD
- Radiofréquence
- Boutons Interrupteurs
- Refroidisseurs Fusibles
- Circuits imprimés
- Câbles Boitiers Connectique
- alimentations piles et accus
- Fer a souder et outillage pour électronique
- Son loisirs kits livres
- Alarmes, vidéo, contrôle d'accès et domotique
Module AHRS subminiature 9 axes

Malgré ses dimensions ridicules de 12 mm x 16 mm, la centrale intègre un accéléromètre 3 axes, un gyromètre 3 axes, un magnétomètre 3 axes, un processeur performant pré-programmé, un régulateur à très faible chute de tension et très faible consommation ainsi qu'une LED de contrôle.
La société NAVEOL propose une nouvelle centrale inertielle issue de ses derniers développements à la pointe de la technologie. Cette AHRS (Attitude and Heading Reference System), qui remplace avantageusement la précédente NavH-01, marque une nouvelle étape de par sa plus petite taille, ses meilleures performances et son prix plus attractif encore.
Malgré ses dimensions ridicules de 12 mm x 16 mm, la centrale intègre un accéléromètre 3 axes, un gyromètre 3 axes, un magnétomètre 3 axes, un processeur performant pré-programmé, un régulateur à très faible chute de tension et très faible consommation ainsi qu'une LED de contrôle.
La NavH 2.0 se présente sous la forme d'un petit module "OEM" avec connexions sur broches à souder au pas de 2.54 mm. Elle est destinée à être raccordée à un microcontrôleur externe afin que ce dernier puisse en récupérer les informations via une liaison série (niveau logique 3.3 V @ 115200 bps).
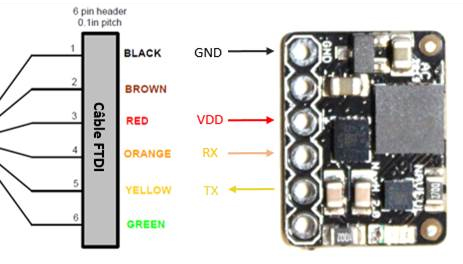
Pour vos besoins de tests et de développement, il vous sera également possible de relier le module à un ordinateur au moyen d'un câble de conversion USB <> Série optionnel (niveau logique 3.3 V).
La centrale inertielle est vendue pré-programmée avec les algorithmes AHRS NAVEOL et est ainsi prête à fonctionner dès sa mise sous tension.
Fonction IMU / AHRS
Le logiciel pré-installé réalise l’acquisition et le filtrage de tous les capteurs. L’algorithme AHRS NAVEOL calcule l’orientation du circuit dans le repère géographique et propose sur sa sortie série une trame de données contenant :
- Les angles d’Euler (Phi, Thêta, Psi)
- Les paramètres du quaternion d’attitude (Q0, Q1, Q2, Q3)
- Les valeurs des capteurs filtrées et corrigées en biais et en facteur d’échelle
Toutes les données sont fournies sous la forme de nombres en virgule flottante sur 32 bits. Cette trame est identique à la trame du module NavH-01.
La trame de données est émise à chaque réception du caractère « F ». Cela permet à l’utilisateur de choisir la cadence de rafraichissement.
Un identificateur de trame (l’octet « F » également) débute chaque transmission.
Un alignement de l’AHRS est réalisé à la mise sous tension (aucun mouvement pendant 2 s). Il est possible de demander un nouvel alignement à tout instant en envoyant le caractère « R ».
Logiciel de test "AHRS Viewer"
Le logiciel NAVEOL AHRS Viewer (disponible en téléchargement) permet l’affichage des informations d’orientation (horizon artificiel et boussole) ainsi que la calibration fine des capteurs :
Malgré ses dimensions ridicules de 12 mm x 16 mm, la centrale intègre un accéléromètre 3 axes, un gyromètre 3 axes, un magnétomètre 3 axes, un processeur performant pré-programmé, un régulateur à très faible chute de tension et très faible consommation ainsi qu'une LED de contrôle.
La NavH 2.0 se présente sous la forme d'un petit module "OEM" avec connexions sur broches à souder au pas de 2.54 mm. Elle est destinée à être raccordée à un microcontrôleur externe afin que ce dernier puisse en récupérer les informations via une liaison série (niveau logique 3.3 V @ 115200 bps).
Pour vos besoins de tests et de développement, il vous sera également possible de relier le module à un ordinateur au moyen d'un câble de conversion USB <> Série optionnel (niveau logique 3.3 V).
La centrale inertielle est vendue pré-programmée avec les algorithmes AHRS NAVEOL et est ainsi prête à fonctionner dès sa mise sous tension.
Fonction IMU / AHRS
Le logiciel pré-installé réalise l’acquisition et le filtrage de tous les capteurs. L’algorithme AHRS NAVEOL calcule l’orientation du circuit dans le repère géographique et propose sur sa sortie série une trame de données contenant :
- Les angles d’Euler (Phi, Thêta, Psi)
- Les paramètres du quaternion d’attitude (Q0, Q1, Q2, Q3)
- Les valeurs des capteurs filtrées et corrigées en biais et en facteur d’échelle
Toutes les données sont fournies sous la forme de nombres en virgule flottante sur 32 bits. Cette trame est identique à la trame du module NavH-01.
La trame de données est émise à chaque réception du caractère « F ». Cela permet à l’utilisateur de choisir la cadence de rafraichissement.
Un identificateur de trame (l’octet « F » également) débute chaque transmission.
Un alignement de l’AHRS est réalisé à la mise sous tension (aucun mouvement pendant 2 s). Il est possible de demander un nouvel alignement à tout instant en envoyant le caractère « R ».
Logiciel de test "AHRS Viewer"
Le logiciel NAVEOL AHRS Viewer (disponible en téléchargement) permet l’affichage des informations d’orientation (horizon artificiel et boussole) ainsi que la calibration fine des capteurs :
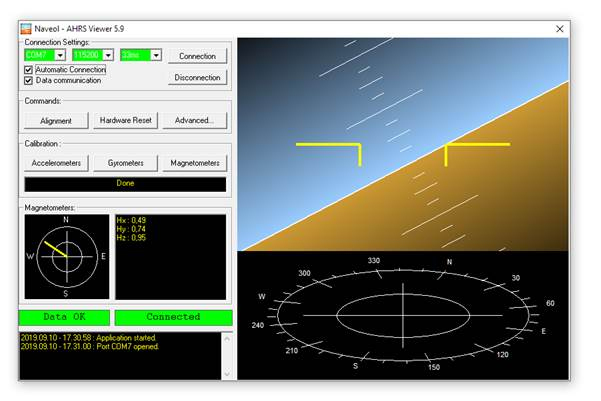
- Biais et facteurs d’échelle des accéléromètres
- Facteurs d’échelle des gyromètres (le biais est poursuivi automatiquement par l’AHRS)
- Biais et facteurs d’échelle des magnétomètres (compensation de fers durs / fers doux)
- Alignement de l’AHRS
- Reset matériel
Caractéristiques techniques matérielles
Capteurs
- Gyromètre 3 axes (500°/s) LSM6DSR (très faible bruit)
- Accéléromètre 3 axes (4 g) LSM6DSR (très faible bruit)
- Magnétomètre 3 axes (4 Ga) LIS3MDL
Processeur
- 16 bits — 16 MIPS (Microchip)
- Faible consommation
- Facteurs d’échelle des gyromètres (le biais est poursuivi automatiquement par l’AHRS)
- Biais et facteurs d’échelle des magnétomètres (compensation de fers durs / fers doux)
- Alignement de l’AHRS
- Reset matériel
Caractéristiques techniques matérielles
Capteurs
- Gyromètre 3 axes (500°/s) LSM6DSR (très faible bruit)
- Accéléromètre 3 axes (4 g) LSM6DSR (très faible bruit)
- Magnétomètre 3 axes (4 Ga) LIS3MDL
Processeur
- 16 bits — 16 MIPS (Microchip)
- Faible consommation
Entrées / Sorties
- UART @ 115200bps
- Directement compatible avec un câble FTDI 3.3 V (non livré)
Alimentation
- Tension : 2.8 V à 10 V
- Consommation : 16 mA
Caractéristiques
- Connecteur au pas de 0.1” (2.54 mm). 6 broches
- 12 mm x 16 mm
- Masse : < 1 g
Caractéristiques techniques logicielles
AHRS
- Tâche temps réel à 100 Hz
- Précision < 1° d’assiette (conditions non dynamiques)
- Précision < 2° de cap (environnement magnétométrique non perturbé)
Communication
- Emission de la trame de données sur demande (réception du caractère F)
- Alignement de l’AHRS (réception du caractère R)
Applications
- Applications embarquées
- Orientation 3D
- Systèmes de stabilisation de caméra
- Systèmes de positionnement d’antenne
- Robotique
Aucun avis
Il est nécessaire d'être connecté pour laisser un avis
Appuyez pour zoomer

Accueil
- Capteurs et Cartes programmables
- Cartes programmables
- Cartes Arduino® officielles
- Cartes compatibles Arduino®
- Cartes compatibles Uno
- Cartes compatibles Leonardo
- Cartes compatibles Mega2560
- Cartes compatibles Nano
- Autres cartes compatibles
- Cartes Lextronic
- Cartes Dasduino
- Jolly
- Teensy
- Cartes E-Textile
- Modules XIAO
- Cartes Sparkfun
- Cartes Adafruit Feather
- Cartes Pololu
- Cartes Whadda
- Cartes Makey Makey
- Cartes Makeblock
- Cartes Bare Conductive
- Cartes Seeed Studio
- Modules M5Stack
- Cartes Flip & Click
- Cartes Digilent
- Cartes DFROBOT
- Cartes JOY-IT
- Cartes diverses
- Kits pour Uno - Mega2560 - Nano
- Shields pour Arduino®
- Shield Proto pour Nano
- Shield Proto pour Uno
- Shield Proto pour Mega2560
- Shield leds et 7 segments
- Shield LCD alphanumériques
- Shield LCD graphiques
- Shield Bus communication
- Shield Bluetooth® - WiFi
- Shield LoRa - Sigfox - Xbee - GSM
- Shield RFID - NFC - GPS
- Shield applications vidéo
- Shield applications audio
- Shield relais - Mosfet
- Shield moteurs - robotique
- Shield fonctions diverses
- Périphériques compatibles Arduino®
- Connecteurs pour Arduino®
- Boitiers et supports pour Arduino®
- Alimentations pour Arduino®
- Robots programmables
- Ouvrages pour Arduino®
- Plaques de prototypage
- Straps souples
- Cartes micro:bit
- Cartes Pi Pico et RP2040
- Cartes et starter kits Pi PICO
- Cartes et modules sur base RP2040
- Cartes prototypage pour PI PICO
- Cartes moteurs pour PI PICO
- Cartes relais pour PI PICO
- Cartes afficheurs pour PI PICO
- Cartes météorologiques pour PI PICO
- Cartes Caméra pour Pi PICO
- Robots pour PI PICO et RP2040
- Cartes diverses pour PI PICO
- Ouvrages techniques pour PI PICO
- Digilent
- Cartes Digilent FPGA / SoC
- Plateformes radio logiciel
- Cartes et modules d'extensions
- Modules Pmod
- Présentation des modules Pmod
- Pmod boutons - interrupteurs
- Pmod joystick - claviers
- Pmod leds - afficheurs LCD
- Pmod stockage mémoire
- Pmod convertisseurs
- Pmod entrées / sorties
- Pmod radiofréquence et bus
- Pmod bus communication
- Pmod accéléromètres - Gyroscopes
- Pmod capteurs divers
- Pmod pour moteurs - servomoteurs
- Pmod divers
- Pmod connecteurs
- Cordons pour module Pmod
- Modules Pcam
- Modules Zmod
- Modules Cmod
- Shield et adaptateurs
- Adaptateurs pour NI myRIO
- Modules Pmod
- DAQ et Data Logging
- Cartes MCU
- Programmateurs JTAG
- Equipements de tests et mesures
- Accessoires divers
- Compléments techniques
- Mikroelektronika
- Click Board
- Présentation
- Radiofréquence
- Bus communication
- Convertisseurs
- Accel / Gyro / IMU
- Horloges RTC
- Air - Gaz
- Lumière - Infrarouge
- Température - Météo
- Magnétique / Pression
- Capteurs divers
- Modules audio
- Stockage mémoire
- Entrées - Sorties
- Modules d'affichage
- Interfaces saisies
- Interfaces moteurs
- Modules divers
- Shield Click Board
- Pack Click
- Compilateurs
- Développement sur PIC
- Développement dsPIC
- Développement PIC32
- Développement ARM
- Développement AVR
- Développement FT90x
- Développement 8051
- Développement PSoC
- mikroLAB
- Afficheurs Mikromedia
- mikromedia HMI
- Bases analogiques
- Modules MCUCard
- Click Board
- OpenMV
- Soldered
- Teensy
- Cartes E-Textile
- Vittascience
- M5Stack
- Espruino
- Pyboard - MicroPython
- Cartes Bare Conductive
- JoC - Javaino
- mbed / Nucleo
- LCD 4D Systems
- Trenz Electronic
- Interfaces Android
- CUBLOC
- PICBASIC
- TinyPLC
- Arcades consoles
- neuron
- Cartes cœur Linux
- Raspberry Pi
- Cartes Raspberry
- Starters-kits Raspberry
- Accessoires pour Raspberry
- Boitiers pour Raspberry
- Caméras pour Raspberry
- Ouvrages pour Raspberry
- DAQ et Data Logging
- Shield Afficheurs leds
- Shield Afficheurs LCD
- Shield Afficheurs graphiques
- Accessoires arcade
- Robotique pour Raspberry
- Shield Entrées/sorties
- Shield Radiofréquence
- Shield capteurs
- Shield audio
- Shield divers
- Radxa
- Arietta
- UNIHIKER
- Onion
- BeagleBone
- LattePanda
- Bases Zynq
- Raspberry Pi
- Modules IOT
- Capteurs - Prototypage
- Capteurs
- Packs de capteurs
- Air (qualité de l'air)
- Biométrie (empreintes digitales)
- Boussoles et AHRS
- Boutons - Claviers
- Bruit - son
- Caméras numériques
- Capteurs spatiaux
- Caméras thermiques
- Chocs et vibrations
- Conductivité (peau et eau)
- Capteurs de couleur et Spectromètres
- Courant et tension
- Débitmètres (pour liquides)
- Déplacement rectiligne
- Distance (télémètres IR)
- Doppler (hyperfréquence)
- Effet Hall
- Encodeurs rotatif
- Environnementaux (météorologique)
- Fin de course (microrupteurs)
- Flexion (flex - bend sensor)
- Force (FSR) et Pesage
- Fourches optiques
- Gaz
- GPS - GNSS - GLONASS
- Gyroscopes et centrales IMU
- Humidité
- Inclinaison - Tilt - Inclinomètre
- Infrarouge
- Joysticks - Stick - Trackball
- Lecteurs code barre
- LiDAR Infrarouge Benewake
- Lumière et luminance
- Magnétiques
- Météo
- Mouvements de la main
- Niveau
- Pont RLC
- Pression
- Proximité
- Pulsation
- Qualité de l'eau
- RFID - NFC
- Rotation
- Serres automatisées
- Suiveur de ligne
- Tactiles
- Température
- Tensions
- Ultrasons
- Ultraviolets
- Prototypage général
- LCD séries - I2C
- LCD demmel products
- Cartes relais / triacs
- Extension d'E/S
- Interfaces BUS
- Interfaces TCP/IP
- Modules IR
- Convertisseurs "A/N - N/A"
- Horloges RTC
- Stockage mémoire
- Conversion tension
- Conversion niveau
- Modules biométriques
- Amplificateurs audio
- Acquisition vidéo
- Interfaces connectique
- Embases RJ45 isolées
- Modules divers
- Proto sur PIC / AVR / 8051
- Tinkerkit
- Modules Click Board
- Présentation
- Radiofréquence
- Bus communication
- Convertisseurs
- Accel / Gyro / IMU
- Horloges RTC
- Air - Gaz
- Lumière - Infrarouge
- Température - Météo
- Magnétique / Pression
- Capteurs divers
- Modules audio
- Stockage mémoire
- Entrées - Sorties
- Modules d'affichage
- Interfaces saisies
- Interfaces moteurs
- Modules divers
- Shield Click Board
- Pack Click
- Modules Pmod
- Modules Grove
- Modules OPEN
- Modules Whadda
- Modules Makeblock
- Interfaces audio
- Reconnaissance vocale
- Straps divers
- Breadboard
- SchmartBOARD
- Adaptateurs composants
- Logiciel de CAO
- Capteurs
- Systèmes Radiofréquences
- Cartes programmables
- Robotique Imprimantes 3D
- Bases robotiques
- Pièces mécaniques
- Roues et chenilles
- Roues libres - Roulettes
- Profilés MakerBeam
- Profilés MakerBeam XS
- Profilés MakerBeam XL
- Profilés OpenBeam
- Gamme ACRZilla
- Profilés Makeblock
- Plaques et supports
- Visseries et entretoises
- Courroies et poulies
- Chaînes - Roues dentées
- Pignons
- Arbres - Roulements
- Mouvement rectiligne non motorisé
- Structures diverses
- Accessoires pneumatiques
- Moteurs et actionneurs
- Commande et contrôleurs
- Imprimantes 3D / CNC
- Capteurs
- Mesure et interfaces
- Composants electroniques
- Composants
- Optoélectronique
- Leds de 1.8 mm à 20 mm
- Flexibles leds filaments
- Leds infrarouges
- Leds de puissance
- Leds NeoPixel adressables
- Rubans Leds
- Supports de led
- Bargraphes à Leds
- Matrices à Leds standards
- Matrices à Leds séries
- 7 segments standards
- 7 segments séries
- Circuits commande de leds
- Voyants
- Ampoules et lucioles
- Photorésistances LDR
- Optocoupleurs
- Afficheurs LCD
- Afficheurs LCD graphiques
- Accessoires pour LCD
- Radiofréquence
- Boutons Interrupteurs
- Refroidisseurs Fusibles
- Circuits imprimés
- Composants
- Câbles Boitiers Connectique
- alimentations piles et accus
- Alimentations
- Transformateurs
- Energie solaire
- Piles et accus
- Coupleurs de piles
- Piles alcalines
- Piles 1,5 V ( LR9 / PX625A )
- Piles 1,5 V ( LR41 / AG3 )
- Piles 1,5 V ( LR43 / 186 )
- Piles 1,5 V ( LR44 / V13GA)
- Piles 1,5 V ( AAA / LR03 )
- Piles 1,5 V ( AA / LR6 )
- Piles 1,5 V ( N / LR1 )
- Piles 1,5 V ( C / LR14 )
- Piles 1,5 V ( D / LR20 )
- Piles 1,55 V ( V389 / AG10 / SR54 )
- Piles 4,5 V ( 3LR12 )
- Piles 6 V ( GP11A / 4LR44 )
- Piles 9 V ( 6LR61 )
- Piles 12 V ( GP23A / GP27A )
- Piles Lithium
- Accus NiMH
- Accus NiMH téléphone et alarme
- Accus NiMH à cosses
- Batteries au plomb
- Power Bank
- Chargeurs
- Accessoires alimentation
- Fer a souder et outillage pour électronique
- Son loisirs kits livres
- Alarmes, vidéo, contrôle d'accès et domotique
- Nouveautes
- Produits obsolètes
- Offres spéciales