Votre panier
Il n'y a plus de produit dans votre panier- Capteurs et Cartes programmables
- Cartes programmables
- Cartes Arduino® officielles
- Cartes compatibles Arduino®
- Cartes micro:bit
- Cartes Pi Pico et RP2040
- Digilent
- Mikroelektronika
- OpenMV
- Soldered
- Teensy
- Cartes E-Textile
- Vittascience
- M5Stack
- Espruino
- Pyboard - MicroPython
- Cartes Bare Conductive
- JoC - Javaino
- mbed / Nucleo
- LCD 4D Systems
- Trenz Electronic
- Interfaces Android
- CUBLOC
- PICBASIC
- TinyPLC
- Arcades consoles
- neuron
- Cartes cœur Linux
- Modules IOT
- Capteurs - Prototypage
- Systèmes Radiofréquences
- Cartes programmables
- Robotique Imprimantes 3D
- Bases robotiques
- Pièces mécaniques
- Roues et chenilles
- Roues libres - Roulettes
- Profilés MakerBeam
- Profilés MakerBeam XS
- Profilés MakerBeam XL
- Profilés OpenBeam
- Gamme ACRZilla
- Profilés Makeblock
- Plaques et supports
- Visseries et entretoises
- Courroies et poulies
- Chaînes - Roues dentées
- Pignons
- Arbres - Roulements
- Mouvement rectiligne non motorisé
- Structures diverses
- Accessoires pneumatiques
- Moteurs et actionneurs
- Commande et contrôleurs
- Imprimantes 3D / CNC
- Capteurs
- Mesure et interfaces
- Composants electroniques
- Composants
- Optoélectronique
- Leds de 1.8 mm à 20 mm
- Flexibles leds filaments
- Leds infrarouges
- Leds de puissance
- Leds NeoPixel adressables
- Rubans Leds
- Supports de led
- Bargraphes à Leds
- Matrices à Leds standards
- Matrices à Leds séries
- 7 segments standards
- 7 segments séries
- Circuits commande de leds
- Voyants
- Ampoules et lucioles
- Photorésistances LDR
- Optocoupleurs
- Afficheurs LCD
- Afficheurs LCD graphiques
- Accessoires pour LCD
- Radiofréquence
- Boutons Interrupteurs
- Refroidisseurs Fusibles
- Circuits imprimés
- Câbles Boitiers Connectique
- alimentations piles et accus
- Fer a souder et outillage pour électronique
- Son loisirs kits livres
- Alarmes, vidéo, contrôle d'accès et domotique
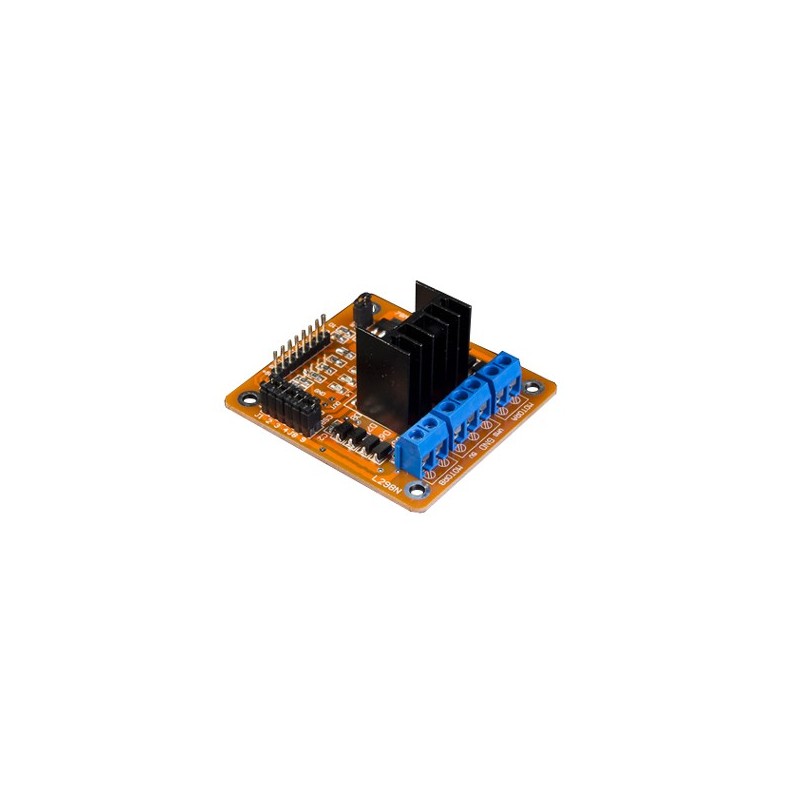
Module drivers pour moteurs cc et pas-à-pas

Ce module basé sur un L298N permet la commander soit 2 moteurs CC (5 à 35 Vcc - 2 A max.) ou un moteur pas-à-pas.
Livré sans moteur, ce module sera idéal pour des applications robotiques. Grace à son drivers L298N (double pont en H), il vous permettra de piloter aussi bien 2 moteurs CC ou un moteur pas-à-pas (2 phases). Les raccordements des moteurs et alimentation externe s'effectuent sur des bornes à vis. Le raccordement pour la commande des moteurs s'effectue sur un connecteur mâle 8 broches au pas de 2,54 mm.
Caractéristiques:
- Drivers: L298N
- Entrée alimentation externe (pour vos moteurs): 5 Vcc à 35 Vcc
- Courant de sortie max. 2 A par canal
- Niveau logique: 5 Vcc
- Contrôle de niveau: bas -0,3V à 1,5V / haut: 2,3 V à Vss
- Puissance max: 25 W
- Dimensions: 69 x 56 x 36 mm
Vous trouverez ci-dessous le descriptif des différentes broches de raccordement du module ainsi que des exemples de codes sources pour Arduino.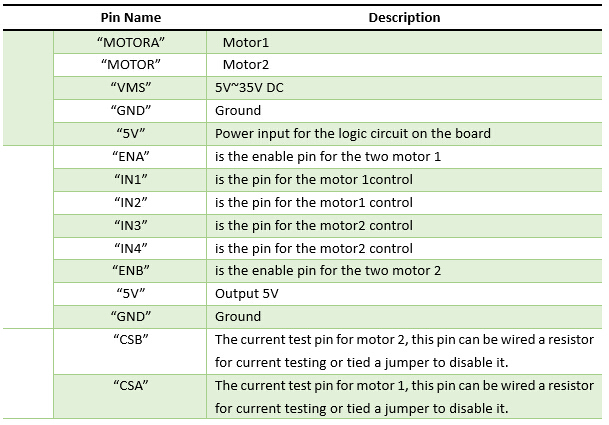
Exemple de code pour une utilisation avec 2 moteurs CC:
Connection:
IN1==========13;
IN2==========12;
IN3==========11;
IN4==========10;
int in1=13; int in2=12; int in3=11; int in4=10; int speedPinA=6; int speedPinB=5; void setup() { pinMode(in1,OUTPUT); pinMode(in2,OUTPUT); pinMode(in3,OUTPUT); pinMode(in4,OUTPUT); digitalWrite(in1,HIGH); digitalWrite(in2,HIGH); digitalWrite(in3,HIGH); digitalWrite(in4,HIGH); } void loop() { _mRight(in1,in2); _mRight(in3,in4); int n=analogRead(A0)/4; _mSetSpeed(speedPinA,n); _mSetSpeed(speedPinB,n); } void _mRight(int pin1,int pin2) { digitalWrite(pin1,HIGH); digitalWrite(pin2,LOW); } void _mLeft(int pin1,int pin2) { digitalWrite(pin1,LOW); digitalWrite(pin2,HIGH); } void _mStop(int pin1,int pin2) { digitalWrite(pin1,HIGH); digitalWrite(pin2,HIGH); } void _mSetSpeed(int pinPWM,int SpeedValue { analogWrite(pinPWM,SpeedValue); }
Exemple de code pour une utilisation avec un moteur pas-à-pas 2 phases:
Connection:
IN1=======8;
IN2=======9;
IN3=======10;
IN4=======11;
#include #define STEPS 100 Stepper stepper(STEPS, 8, 9, 10, 11); int previous = 0; void setup() { stepper.setSpeed(90); } void loop() { int val = analogRead(0); stepper.step(val - previous); previous = val; }
Aucun avis
Il est nécessaire d'être connecté pour laisser un avis
Produits associés



Appuyez pour zoomer
Accueil
- Capteurs et Cartes programmables
- Cartes programmables
- Cartes Arduino® officielles
- Cartes compatibles Arduino®
- Cartes compatibles Uno
- Cartes compatibles Leonardo
- Cartes compatibles Mega2560
- Cartes compatibles Nano
- Autres cartes compatibles
- Cartes Lextronic
- Cartes Dasduino
- Jolly
- Teensy
- Cartes E-Textile
- Modules XIAO
- Cartes Sparkfun
- Cartes Adafruit Feather
- Cartes Pololu
- Cartes Whadda
- Cartes Makey Makey
- Cartes Makeblock
- Cartes Bare Conductive
- Cartes Seeed Studio
- Modules M5Stack
- Cartes Flip & Click
- Cartes Digilent
- Cartes DFROBOT
- Cartes JOY-IT
- Cartes diverses
- Kits pour Uno - Mega2560 - Nano
- Shields pour Arduino®
- Shield Proto pour Nano
- Shield Proto pour Uno
- Shield Proto pour Mega2560
- Shield leds et 7 segments
- Shield LCD alphanumériques
- Shield LCD graphiques
- Shield Bus communication
- Shield Bluetooth® - WiFi
- Shield LoRa - Sigfox - Xbee - GSM
- Shield RFID - NFC - GPS
- Shield applications vidéo
- Shield applications audio
- Shield relais - Mosfet
- Shield moteurs - robotique
- Shield fonctions diverses
- Périphériques compatibles Arduino®
- Connecteurs pour Arduino®
- Boitiers et supports pour Arduino®
- Alimentations pour Arduino®
- Robots programmables
- Ouvrages pour Arduino®
- Plaques de prototypage
- Straps souples
- Cartes micro:bit
- Cartes Pi Pico et RP2040
- Cartes et starter kits Pi PICO
- Cartes et modules sur base RP2040
- Cartes prototypage pour PI PICO
- Cartes moteurs pour PI PICO
- Cartes relais pour PI PICO
- Cartes afficheurs pour PI PICO
- Cartes météorologiques pour PI PICO
- Cartes Caméra pour Pi PICO
- Robots pour PI PICO et RP2040
- Cartes diverses pour PI PICO
- Ouvrages techniques pour PI PICO
- Digilent
- Cartes Digilent FPGA / SoC
- Plateformes radio logiciel
- Cartes et modules d'extensions
- Modules Pmod
- Présentation des modules Pmod
- Pmod boutons - interrupteurs
- Pmod joystick - claviers
- Pmod leds - afficheurs LCD
- Pmod stockage mémoire
- Pmod convertisseurs
- Pmod entrées / sorties
- Pmod radiofréquence et bus
- Pmod bus communication
- Pmod accéléromètres - Gyroscopes
- Pmod capteurs divers
- Pmod pour moteurs - servomoteurs
- Pmod divers
- Pmod connecteurs
- Cordons pour module Pmod
- Modules Pcam
- Modules Zmod
- Modules Cmod
- Shield et adaptateurs
- Adaptateurs pour NI myRIO
- Modules Pmod
- DAQ et Data Logging
- Cartes MCU
- Programmateurs JTAG
- Equipements de tests et mesures
- Accessoires divers
- Compléments techniques
- Mikroelektronika
- Click Board
- Présentation
- Radiofréquence
- Bus communication
- Convertisseurs
- Accel / Gyro / IMU
- Horloges RTC
- Air - Gaz
- Lumière - Infrarouge
- Température - Météo
- Magnétique / Pression
- Capteurs divers
- Modules audio
- Stockage mémoire
- Entrées - Sorties
- Modules d'affichage
- Interfaces saisies
- Interfaces moteurs
- Modules divers
- Shield Click Board
- Pack Click
- Compilateurs
- Développement sur PIC
- Développement dsPIC
- Développement PIC32
- Développement ARM
- Développement AVR
- Développement FT90x
- Développement 8051
- Développement PSoC
- mikroLAB
- Afficheurs Mikromedia
- mikromedia HMI
- Bases analogiques
- Modules MCUCard
- Click Board
- OpenMV
- Soldered
- Teensy
- Cartes E-Textile
- Vittascience
- M5Stack
- Espruino
- Pyboard - MicroPython
- Cartes Bare Conductive
- JoC - Javaino
- mbed / Nucleo
- LCD 4D Systems
- Trenz Electronic
- Interfaces Android
- CUBLOC
- PICBASIC
- TinyPLC
- Arcades consoles
- neuron
- Cartes cœur Linux
- Raspberry Pi
- Cartes Raspberry
- Starters-kits Raspberry
- Accessoires pour Raspberry
- Boitiers pour Raspberry
- Caméras pour Raspberry
- Ouvrages pour Raspberry
- DAQ et Data Logging
- Shield Afficheurs leds
- Shield Afficheurs LCD
- Shield Afficheurs graphiques
- Accessoires arcade
- Robotique pour Raspberry
- Shield Entrées/sorties
- Shield Radiofréquence
- Shield capteurs
- Shield audio
- Shield divers
- Radxa
- Arietta
- UNIHIKER
- Onion
- BeagleBone
- LattePanda
- Bases Zynq
- Raspberry Pi
- Modules IOT
- Capteurs - Prototypage
- Capteurs
- Packs de capteurs
- Air (qualité de l'air)
- Biométrie (empreintes digitales)
- Boussoles et AHRS
- Boutons - Claviers
- Bruit - son
- Caméras numériques
- Capteurs spatiaux
- Caméras thermiques
- Chocs et vibrations
- Conductivité (peau et eau)
- Capteurs de couleur et Spectromètres
- Courant et tension
- Débitmètres (pour liquides)
- Déplacement rectiligne
- Distance (télémètres IR)
- Doppler (hyperfréquence)
- Effet Hall
- Encodeurs rotatif
- Environnementaux (météorologique)
- Fin de course (microrupteurs)
- Flexion (flex - bend sensor)
- Force (FSR) et Pesage
- Fourches optiques
- Gaz
- GPS - GNSS - GLONASS
- Gyroscopes et centrales IMU
- Humidité
- Inclinaison - Tilt - Inclinomètre
- Infrarouge
- Joysticks - Stick - Trackball
- Lecteurs code barre
- LiDAR Infrarouge Benewake
- Lumière et luminance
- Magnétiques
- Météo
- Mouvements de la main
- Niveau
- Pont RLC
- Pression
- Proximité
- Pulsation
- Qualité de l'eau
- RFID - NFC
- Rotation
- Serres automatisées
- Suiveur de ligne
- Tactiles
- Température
- Tensions
- Ultrasons
- Ultraviolets
- Prototypage général
- LCD séries - I2C
- LCD demmel products
- Cartes relais / triacs
- Extension d'E/S
- Interfaces BUS
- Interfaces TCP/IP
- Modules IR
- Convertisseurs "A/N - N/A"
- Horloges RTC
- Stockage mémoire
- Conversion tension
- Conversion niveau
- Modules biométriques
- Amplificateurs audio
- Acquisition vidéo
- Interfaces connectique
- Embases RJ45 isolées
- Modules divers
- Proto sur PIC / AVR / 8051
- Tinkerkit
- Modules Click Board
- Présentation
- Radiofréquence
- Bus communication
- Convertisseurs
- Accel / Gyro / IMU
- Horloges RTC
- Air - Gaz
- Lumière - Infrarouge
- Température - Météo
- Magnétique / Pression
- Capteurs divers
- Modules audio
- Stockage mémoire
- Entrées - Sorties
- Modules d'affichage
- Interfaces saisies
- Interfaces moteurs
- Modules divers
- Shield Click Board
- Pack Click
- Modules Pmod
- Modules Grove
- Modules OPEN
- Modules Whadda
- Modules Makeblock
- Interfaces audio
- Reconnaissance vocale
- Straps divers
- Breadboard
- SchmartBOARD
- Adaptateurs composants
- Logiciel de CAO
- Capteurs
- Systèmes Radiofréquences
- Cartes programmables
- Robotique Imprimantes 3D
- Bases robotiques
- Pièces mécaniques
- Roues et chenilles
- Roues libres - Roulettes
- Profilés MakerBeam
- Profilés MakerBeam XS
- Profilés MakerBeam XL
- Profilés OpenBeam
- Gamme ACRZilla
- Profilés Makeblock
- Plaques et supports
- Visseries et entretoises
- Courroies et poulies
- Chaînes - Roues dentées
- Pignons
- Arbres - Roulements
- Mouvement rectiligne non motorisé
- Structures diverses
- Accessoires pneumatiques
- Moteurs et actionneurs
- Commande et contrôleurs
- Imprimantes 3D / CNC
- Capteurs
- Mesure et interfaces
- Composants electroniques
- Composants
- Optoélectronique
- Leds de 1.8 mm à 20 mm
- Flexibles leds filaments
- Leds infrarouges
- Leds de puissance
- Leds NeoPixel adressables
- Rubans Leds
- Supports de led
- Bargraphes à Leds
- Matrices à Leds standards
- Matrices à Leds séries
- 7 segments standards
- 7 segments séries
- Circuits commande de leds
- Voyants
- Ampoules et lucioles
- Photorésistances LDR
- Optocoupleurs
- Afficheurs LCD
- Afficheurs LCD graphiques
- Accessoires pour LCD
- Radiofréquence
- Boutons Interrupteurs
- Refroidisseurs Fusibles
- Circuits imprimés
- Composants
- Câbles Boitiers Connectique
- alimentations piles et accus
- Alimentations
- Transformateurs
- Energie solaire
- Piles et accus
- Coupleurs de piles
- Piles alcalines
- Piles 1,5 V ( LR9 / PX625A )
- Piles 1,5 V ( LR41 / AG3 )
- Piles 1,5 V ( LR43 / 186 )
- Piles 1,5 V ( LR44 / V13GA)
- Piles 1,5 V ( AAA / LR03 )
- Piles 1,5 V ( AA / LR6 )
- Piles 1,5 V ( N / LR1 )
- Piles 1,5 V ( C / LR14 )
- Piles 1,5 V ( D / LR20 )
- Piles 1,55 V ( V389 / AG10 / SR54 )
- Piles 4,5 V ( 3LR12 )
- Piles 6 V ( GP11A / 4LR44 )
- Piles 9 V ( 6LR61 )
- Piles 12 V ( GP23A / GP27A )
- Piles Lithium
- Accus NiMH
- Accus NiMH téléphone et alarme
- Accus NiMH à cosses
- Batteries au plomb
- Power Bank
- Chargeurs
- Accessoires alimentation
- Fer a souder et outillage pour électronique
- Son loisirs kits livres
- Alarmes, vidéo, contrôle d'accès et domotique
- Nouveautes
- Produits obsolètes
- Offres spéciales