Votre panier
Il n'y a plus de produit dans votre panier 0 Voir le panier / Générer un devis / Vide
Connexion
Applications Robotiques
Vous trouverez ci-dessous de très nombreuses notes d'applications mais aussi des exemples de programmes et des descriptions de réalisations conçues sur la base des modules PICBASIC, lesquelles vous permettront d'accélérer et de faciliter le développement de vos propres projets. Certains des programmes sources présentés dans ces notes d'applications sont téléchargeables via ce lien.
Pelle "Liebherr R996" - 14/06/2008 - Par Mr Champleboux Eric

Ce modèle, qui est la réplique au 1/12eme d'une des plus grosse pelle hydraulique au monde, la LIEBHERR R996 litronic a necessité plus de deux ans et demi de travail soit environ 2500 heures, environ 9000 vis et écrous et a peu près 5000 pièces.


Son poids est de 160 kg avec un bras pesant environ 50 kg et un lest arrière de 50 kg.
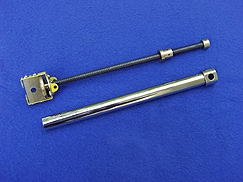
Les verrins fonctionnent avec des vis à profil trapèzoîdal utilsées pour les déplacements linéaires en robotique associées à des trains d'engrenages variés. Son fonctionnement est assuré par sept moteurs CC contrôlés par autant de variateurs réalisés spécifiquements pour chaque type de mouvement afin d'éviter des excès de couple qui seraient destructeurs pour la partie mécanique sur un modèle de ce poids.


Ces variateurs ainsi que la gestion des fonctions radio et accessoires sont réalisés à base de PICBASIC-3B, un module son fonctionnant avec une mémoire de type ISD 2532 suivie d'un amplificateur reproduit fidèlement le bruit des moteurs diesel.
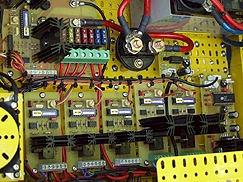
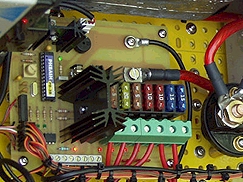
La partie puissance est séparée galvaniquement de la partie électronique par opto-coupleurs pour éviter des interférences lors des forts appels de courant (40 A pour certains moteurs....).
Deux batteries 12V24AH assurent l'alimentation de puissance et une troisième celle de la partie électronique. Une vidéo en fonctionnement est disponible sur youtube:
https://www.youtube.com/watch?v=DoDVgyNKN_4
Blog "Robotique" - 21/10/2007 - Par Mr MOUGEOT Hervé

Voici un très bon site Internet réalisé par un passionné de robotique. Accessible à la manière d'un Blog, il présente une multitude de réalisations de la plus simple à la plus sophistiquée. Une mine d'informations et d'idées à consulter sans modération. Certains robots sont conçus sur la base de modules PICBASIC. Pour plus d'infos, consultez le site: hervemougeot.unblog.fr
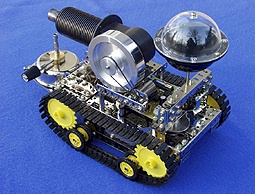
Robot "Robotrack" - 16/05/2006 - Par Mr Champleboux
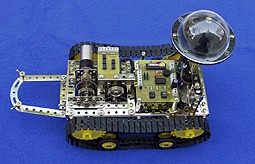
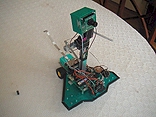
Voici le dernier petit chef-d'œuvre en date réalisé par Mr Champleboux sur une base d'éléments MECCANO™ et de PICBASIC-3B. Cette nouvelle réalisation est originale à plus d'un titre, car mélangeant des notions mécaniques assez anciennes avec de l'électronique dernier cri.... Ce robot est uniquement alimenté par une génératrice à CC entraînée par un moteur à cycle STIRLING chauffé par un brûleur à GAZ.. Ce moteur est du type à deux pistons axiaux, un déplaceur et un moteur qui sont plaçés dans le même cylindre. Le rendement de ce type de moteur est relativement faible et il a fallu user de prouesses mécaniques et technologiques pour réussir à alimenter les 3 moteurs.
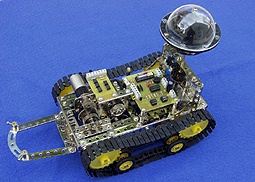
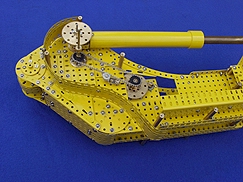
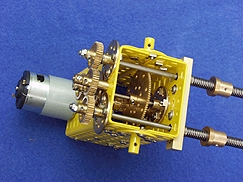
Robotrack comporte un moteur pour la propulsion, un pour la rotation à droite et à gauche des chenilles et un dernier pour la rotation de la tête de détection infrarouge. Ce robot détecte le faisceau pulsé d'une balise IR émettrice et se dirige sur celle-ci grâce à une tête de détection (sphère noire et transparente) qui balaie l'espace sur 270°. Lorsque l'émission est détectée, Robotrack entame sa progression et effectue les corrections nécessaires à droite et à gauche proportionnellement à l'angle formé entre le mobile et le faisceau IR. Le PIC BASIC effectue les calculs à partir de l'information donnée par un potentiomètre entraîné en même temps que la sphère de détection. Les moteurs sont des moto-réducteurs suisses à très haut rendement assez coûteux, mais très performants et les rapports de réduction ont été optimisés afin d'obtenir une consommation minimale.
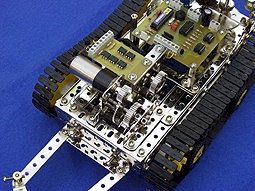
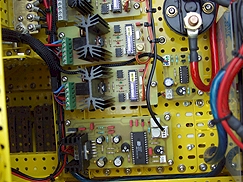
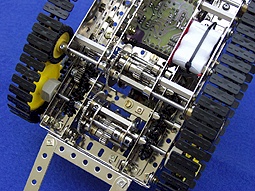
La transmission mécanique des chenilles utilise deux différentiels couplés de façon particulière (voir photo) nommée " transmission GLEASMAN™", elle fut utilisée sur les engins militaires à chenille. Un premier moteur entraîne un premier différentiel et assure le déplacement en ligne droite lorsque le second moteur qui entraîne le second différentiel est à l'arrêt. Lorsque le second moteur tourne dans un sens ou un autre, le véhicule tourne sur lui-même à gauche ou à droite. L'avantage de cette transmission est double : en ligne droite, les 2 chenilles tournent exactement à la même vitesse et le deuxième moteur est utilisé uniquement pour les rotations ; ceci entraîne une moindre consommation électrique ( très important dans notre cas!).
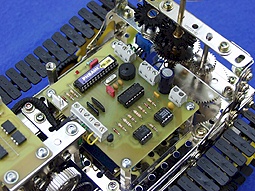
Dernier détail à signaler, l'interface de commande de puissance des moteurs est réalisée à partir de relais statiques photo-MOS, toujours dans un souci d'économie d'énergie ( les ponts en H intégrés consomment à eux seuls autant que les moteurs!). La génératrice CC utilise un 4ème moteur entraîné par le moteur STIRLING™. En bref, ce modèle a demandé beaucoup de recherche et d'expérimentation pour obtenir un fonctionnement correct ! J'espère que vous apprécierez.....
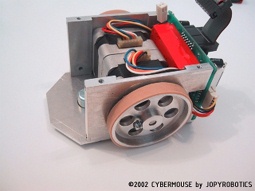
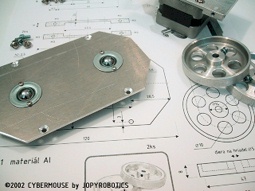
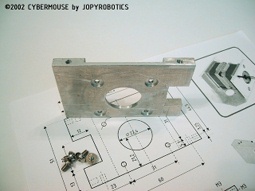
Robot "Cybermouse" - 28/09/2002 - Par Mr Jopy Hecko

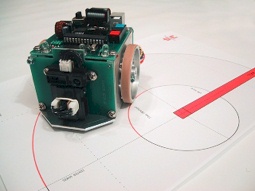
Voici une réalisation déjà ancienne (mais que nous avions totalement oublié de vous présenter). Pour une fois celle-ci ne nous viens pas de France... mais de Slovaquie !

Ce robot a été construit à l'occasion d'un concour local (ISTROBOT 2002 robotic contest). Doté de plusieurs catégorie: "Linefollower", "Micromouse", "Freestyle", ce robot a été présenté dans la catégorie "Micromouse" pour laquelle il a gagné un prix !
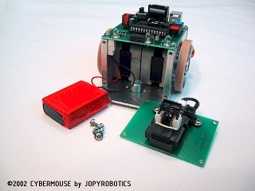
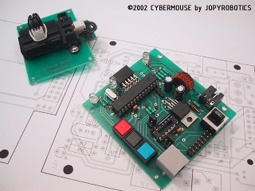
Ce dernier fait appel entre autre à un PICBASIC-3B (l'auteur a retiré l'etiquette du composant). Il utilise également 3 détecteurs SHARP™ GP2D120, un kit pilotage de moteurs "JSMOTOR Kit" de Microrobot™, 2 moteurs pas-à-pas SANYO™ "DENKI H546" et 2 accus 7,2 Vcc.
Robot "autonome" - 28/02/2006 - Par Mr Sylzain F.
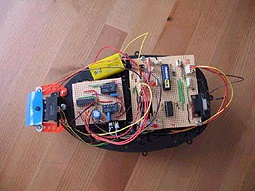
Voici une nouvelle réalisation d'un robot mobile autonome réalisée à base d'un PICBASIC-3B. Ce robot est équipé d'un capteur infrarouge monté sur un servomoteur afin de pouvoir opérer une "surveillance" sur 180 °.
Robot radiopiloté "REDOM" - 15/11/2005 - Par Mr Narbonne Alex
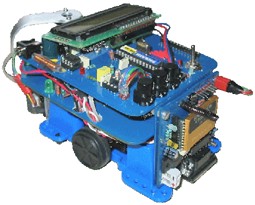
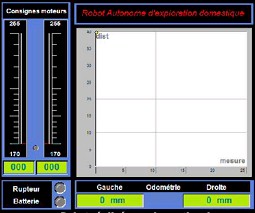
Voici le dernier petit chef-d'œuvre en date réalisé par Mr Narbonne Alex ! Un superbe robot ludique dédié à l’exploration domestique. Ce robot est radiopilotable depuis un PC (au moyen d'un petit modem radio 433 MHz), via un joystick par exemple. A tout moment le pilote peut ordonner au robot la capture d’une "vue radar" de son environnement via son télémètre infrarouge monté sur servomoteur. Les mesures réalisées sont envoyées au PC qui pourra les afficher sous forme graphique (via un logiciel réalisé sous ProFilab Expert). Enfin une odomètrie est réalisée sur les deux roues, elle aussi transmise par radio au PC pour affichage. L’ensemble se veut simple d’usage et de fabrication mais néanmoins performant et évolutif. Consultez et téléchargez sans plus attendre le dossier de réalisation complet ainsi que la vidéo du robot.
Robot "Robosapien™ modifdié" - 19/10/2004 - Olivier Lanvin

Cette application montre comment piloter un robot "Robosapien™" via des ordres infrarouges à l'aide d'un PICBASIC-3B associé à un capteur de proximité GP2D02. Une réalisation très originale !
Robot "Phil" - 10/05/2004 - Zacharie IRACE & Mathieu CIVEL
Un excellent site décrivant la réalisation d'un robot personnel (nombreuses explications, schémas, conseils... à consulter impérativement).
Robot "Phil" - 10/05/2004 - Zacharie IRACE & Mathieu CIVEL

Ce site est consacré à la description d'un projet de TPE de terminale S. Très bien documenté et très complet, il décrit la réalisation d'un robot à base de PICBASIC pilotable à distance depuis un PC via une liaison radio.
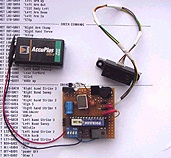
Robot "Basic Bot" - 23/11/2002 - Comfile technology

Ce robot programmable est équipé d'un PICBASIC-3B. Il pourra en fonction de votre programmation réaliser une multitude de fonctions. Les programmes ci-dessous (téléchargeables depuis la page principale des "Notes d'applications" vous donnent un aperçu de ses possibilités).
Avoider Programme permettant au robot d'éviter les obstacles grâce à ses 2 capteurs IR latéraux. En cas de détection, le robot repart en arrière et suivant l'emplacement de l'obstacle fait un écart à gauche ou à droite.
Line-Tracer Programme permettant au robot de suivre une ligne noire au sol grâce à l'utilisation de ses capteurs IR au sol.
Vagabond Programme permettant au robot de se déplacer sur une table sans tomber grâce à l'utilisation de ses capteurs IR au sol (dès qu'il détecte le vide, il fait demi tours pour revenir vers le centre de la table).
TEST Affiche une indication de la distance des obstacles devant le robot (nécessite un afficheur LCD à commande série optionnel)
Avoider2 Contrairement au programme "Avoider", qui ne testait que 2 capteurs IR, le robot "Avoider2" test touts les capteurs IR avec plusieurs cas de figures) - Si le capteur droit détecte un obstacle, le robot tourne à gauche pour le contourner - Si le capteur gauche détecte un obstacle, le robot tourne à droite pour le contourner - Si les 2 capteurs du centre détectent un obstacle le robot tourne de façon pseudo aléatoire à droite ou à gauche pour le contourner - Si les capteurs droite et gauche détectent un obstacle en même temps (robot coincé dans un angle de mur par exemple, ce dernier fait demi tours et repart dans l'autre sens)
IR_AV Ce programme nécessite l'utilisation d'une télécommande infrarouge (type téléviseur, magnétoscope, etc...) - A la mise sous tension du robot et après avoir appuyé sur son bouton, ce dernier reste immobile. Si vous sollicitez la télécommande en visant le côté du robot (à la hauteur de ses capteurs IR), ce dernier évitera le faisceau en tournant sur lui même dans le sens opposé au capteur "éclairé". Si vous visez ses 2 capteurs du milieu, il vous tournera tête en faisant un demi-tour sur lui même.
IR_SEEK Ce programme nécessite l'utilisation d'une télécommande infrarouge (type téléviseur, magnétoscope, etc...) - A la mise sous tension du robot et après avoir appuyé sur son bouton, ce dernier tourne sur lui même. Si vous sollicitez la télécommande en visant le robot (à la hauteur de ses capteurs IR), ce dernier s'arretera en face de votre faisceau. Si vous relâchez le bouton de la télécommande, le robot se remet à tourner.
IR_SEEK1 Ce programme est identique au précédent, mise à part qu'une fois qu'il aura détecté votre faisceau, le robot tournera sur place à droite ou à gauche pour suivre ce dernier si vous déplacez la télécommande infrarouge autour du robot tout en maintenant le faisceaux actif. Si vous relâchez le bouton de la télécommande, le robot se remet à tourner.
IR_SEEK2 Ce programme est similaire au précédent - A la mise sous tension du robot et après avoir appuyé sur son bouton, ce dernier tourne sur lui même. Si vous sollicitez votre télécommande en visant le robot (à la hauteur de ses capteurs IR), ce dernier se dirigera vers elle en se guidant grâce à son faisceau. Si vous relâchez le bouton de la télécommande, le robot se remet à tourner à la recherche de son faisceau. Ce programme constitue une base pour la réalisation de robot capable de retourner seul à une base fixe (ou de robots capables de se suivre l'un l'autre).
A noter que pour les programmes "IR_AV / IR_SEEK / IR_SEEK1 / IR_SEEK2", la portée et l'efficacité de la télécommande peuvent varier d'une marque à l'autre, essayez plusieurs modèles (un paramètre dans le programme permet également de régler le seuil d'action de votre télécommande).
TWIN Cette version vous permet d'utiliser au choix le programme "Avoider2" ou "IR_SEEK2" dans un même robot. A la mise sous tension, placez votre main devant les capteurs du milieu et appuyez sur le bouton du robot. Dès lors il exécutera le programme "Avoider2". Si vous appuyez sur le bouton sans avoir mis la main devant le robot, il exécutera le programme "IR_SEEK".
Robot "programmable" - 12/06/2003 - Defais J.M

Robot paru dans la revue "Electronique Pratique".