Votre panier
Il n'y a plus de produit dans votre panier








La carte Arduino® Nano RP2040 Connect se présente sous la forme d'une carte Arduino® Nano conçue sur la base du nouveau processeur RP2040 de la fondation Raspberry (avec connectivité Bluetooth et WiFi).
L'Arduino Nano RP2040 Connect est la carte la plus richement équipée de la famille Nano. Construite autour du Raspberry Pi RP2040 (dual-core ARM Cortex-M0+ à 133 MHz) et du module radio u-blox Nina W102 (WiFi + BLE), elle embarque en plus une IMU 6 axes, un microphone MEMS, une LED RGB et 16 Mo de Flash — le tout dans le format compact Nano de 45 × 18 mm.
Référencée ABX00053, cette carte est livrée avec les connecteurs mâles pré-soudés. Elle se programme en Arduino C++, en MicroPython via OpenMV (licence gratuite incluse), et elle est compatible Arduino IoT Cloud. Une carte faite pour les projets IoT, le machine learning embarqué et l'analyse audio.
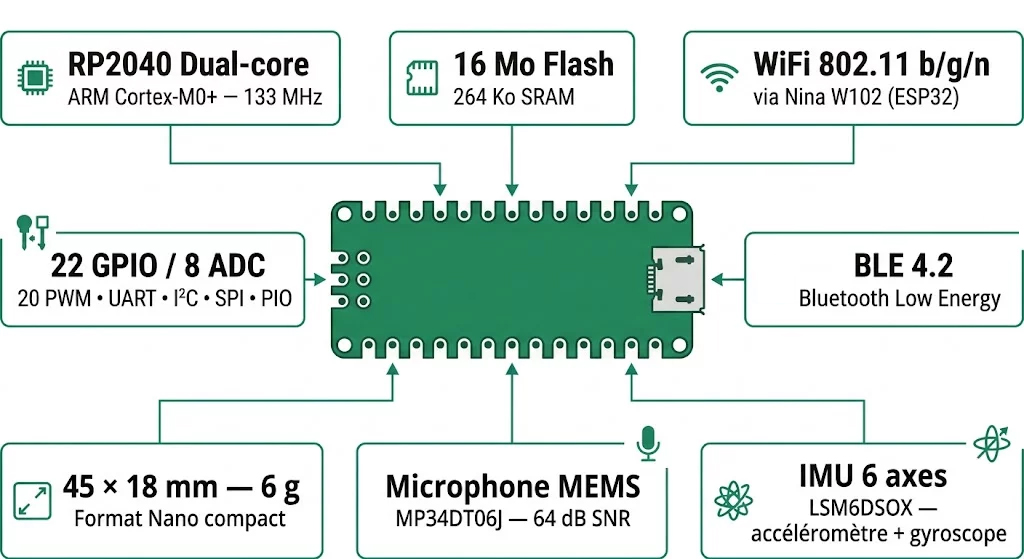
Spécifications visuelles de l'Arduino Nano RP2040 Connect ABX00053
Le Nano RP2040 Connect occupe une place unique dans la gamme Arduino : c'est la seule carte Nano qui combine un processeur RP2040, une connectivité WiFi/BLE et des capteurs embarqués (IMU + microphone). Pour un Nano, c'est un sacré package.
Le RP2040, conçu par la fondation Raspberry Pi, est un processeur à deux cœurs ARM Cortex-M0+ cadencés à 133 MHz. Avec ses 264 Ko de SRAM répartis en six banques indépendantes et un accès DMA, il excelle dans le traitement parallèle. Mais la vraie pépite, c'est le PIO (Programmable I/O) : deux blocs de state machines hardware qui permettent d'implémenter n'importe quel protocole de communication (WS2812B, I2S, UART personnalisé…) sans mobiliser les cœurs principaux. C'est une fonctionnalité qu'on ne trouve sur aucun autre Nano.
La connectivité sans fil est assurée par le module u-blox Nina W102, basé sur un ESP32 (Xtensa LX6 dual-core à 240 MHz). Il gère le WiFi 802.11 b/g/n et le Bluetooth Low Energy 4.2 avec une antenne intégrée. Ce module peut aussi être programmé indépendamment du RP2040 via les pads SWD sous la carte, ce qui ouvre des possibilités avancées.
Côté capteurs embarqués, l'IMU LSM6DSOXTR fournit des données d'accéléromètre et de gyroscope 3D, avec un core de machine learning dédié pour la détection de gestes, la détection de chute ou le comptage de pas — directement dans le silicium, sans surcharger le processeur principal. Le microphone MEMS MP34DT06JTR (omnidirectionnel, 64 dB de rapport signal/bruit) permet la capture audio en temps réel, l'analyse sonore et même la commande vocale.
La carte est compatible MicroPython via OpenMV, et une licence gratuite OpenMV est incluse à l'achat. Pour les projets de vision machine (avec une caméra externe connectée via SPI), c'est un atout appréciable. L'écosystème logiciel couvre aussi l'Arduino IoT Cloud pour le monitoring à distance et le contrôle par smartphone.
Le processeur principal est le Raspberry Pi RP2040, un microcontrôleur dual-core ARM Cortex-M0+ 32 bits cadencé à 133 MHz. Il dispose de 264 Ko de SRAM organisée en six banques indépendantes, permettant un accès simultané par les deux cœurs et le contrôleur DMA. La mémoire flash est externe : un chip AT25SF128A de 16 Mo connecté en QSPI, exploitable directement grâce à la fonctionnalité XIP (Execute-In-Place) du RP2040. Un oscillateur MEMS externe à 12 MHz fournit l'horloge de base.
Le PIO (Programmable I/O) du RP2040 est une fonctionnalité matérielle distinctive : deux blocs contenant chacun 4 state machines indépendantes, capables d'exécuter des programmes en parallèle pour implémenter des protocoles de communication arbitraires avec un timing cycle-exact. Idéal pour piloter des bandes de LED WS2812B, des bus I2S ou des protocoles propriétaires sans impact sur les cœurs principaux.
La connectivité sans fil repose sur le module u-blox Nina W102, qui embarque un ESP32 Xtensa LX6 dual-core à 240 MHz avec 520 Ko de SRAM. Il fournit le WiFi 802.11 b/g/n (portée jusqu'à 400 m en extérieur) et le Bluetooth Low Energy 4.2 via une antenne PCB intégrée. Ce module gère aussi les entrées analogiques A4-A7 (12 bits) et la LED RGB.
Les capteurs embarqués comprennent l'IMU LSM6DSOXTR (accéléromètre + gyroscope 6 axes avec un core Machine Learning intégré pour la détection de gestes et d'anomalies) et le microphone MEMS MP34DT06JTR (omnidirectionnel, interface PDM, rapport signal/bruit de 64 dB, plage de fonctionnement -40 °C à +85 °C).
Le brochage expose 22 broches GPIO numériques, dont 20 supportent le PWM (toutes sauf A6 et A7). Les 8 entrées analogiques (A0-A7) se répartissent entre le RP2040 (A0-A3, ADC interne) et le Nina W102 (A4-A7, ADC 12 bits). Les pins A4/A5 servent par défaut de bus I²C (pull-up de 4,7 kΩ intégrés) et ne sont pas recommandés comme entrées analogiques standards. Les interfaces incluent UART, I²C, SPI, et bien sûr le PIO. Le port micro-USB (USB 1.1) gère l'alimentation et la programmation. L'alimentation alternative se fait via Vin (5 à 18 V). Un convertisseur buck fournit le 3,3 V. Le pin VBUS (5 V) n'est actif que si le jumper VBUS au dos de la carte est soudé.
Toutes les E/S fonctionnent en 3,3 V. Le format physique reste le standard Nano : 45 × 18 mm, environ 6 grammes, avec connecteurs pré-soudés au pas de 2,54 mm.
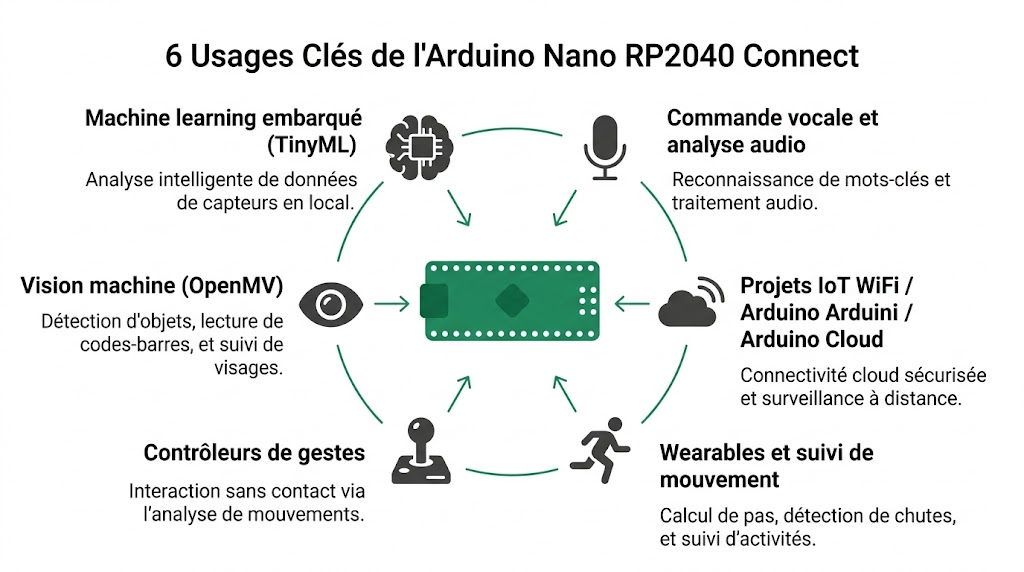
Six cas d'usage courants de l'Arduino Nano RP2040 Connect
Le Nano ESP32 (ESP32-S3, Xtensa LX7 à 240 MHz) est plus rapide en fréquence brute et dispose de plus de RAM (512 Ko contre 264 Ko). Son WiFi et son BLE 5.0 sont natifs au SoC, pas gérés par un coprocesseur, ce qui simplifie la pile réseau. Il supporte MicroPython nativement, l'émulation HID, l'USB-C, et le protocole ESP-NOW. Mais il n'a ni IMU, ni microphone, ni PIO. Si votre projet a besoin de capteurs intégrés, de traitement audio ou de protocoles I/O personnalisés, le Nano RP2040 Connect prend l'avantage.
Le Nano 33 IoT (SAMD21, Cortex-M0+ à 48 MHz) est plus limité en puissance : un seul cœur, 32 Ko de RAM, 256 Ko de Flash. Il utilise aussi un Nina W102 pour le WiFi/BLE, comme le RP2040 Connect. Il dispose d'un élément sécurisé ATECC608 que le RP2040 Connect n'a pas, mais il ne possède ni IMU intégrée, ni microphone, ni PIO. Le RP2040 Connect est son successeur naturel pour les projets qui demandent plus de puissance et de capteurs embarqués.
En résumé : le Nano RP2040 Connect se distingue par ses capteurs embarqués (IMU + microphone), le PIO du RP2040, et le support OpenMV pour la vision machine. Le Nano ESP32 le surpasse en puissance brute et en modernité de l'interface (USB-C, BLE 5.0, HID). Le choix dépend du projet.
La carte se programme via l'Arduino IDE (desktop ou Cloud Editor). Il faut installer le board package "Arduino Mbed OS Nano Boards" via le gestionnaire de cartes. Sous Linux, un script post-installation peut être nécessaire pour les règles udev. La connexion se fait via un câble micro-USB.
Pour MicroPython, la procédure passe par OpenMV. On met la carte en mode bootloader (double appui sur reset), un disque "RPI-RP2" apparaît, et OpenMV installe le firmware MicroPython. La licence OpenMV est gratuite et incluse avec la carte. On peut ensuite coder en Python avec accès aux capteurs (IMU, microphone) et à la connectivité WiFi/BLE. L'éditeur Thonny fonctionne aussi avec le firmware MicroPython standard du RP2040.
Un point important : si vous avez flashé le firmware OpenMV/MicroPython et que vous souhaitez revenir à Arduino, il faut remettre la carte en mode bootloader avant le premier upload depuis l'IDE Arduino. Cette manipulation n'est nécessaire qu'une seule fois.
La LED RGB est contrôlée par le module Nina W102 (pas directement par le RP2040). Il faut donc inclure la bibliothèque WiFiNINA pour y accéder, même si vous n'utilisez pas le WiFi. Les constantes LEDR, LEDG, LEDB sont disponibles, avec une logique inversée (LOW = allumée, HIGH = éteinte, car c'est une LED à anode commune).
Attention aux niveaux logiques : les E/S fonctionnent en 3,3 V. Le pin 5V (VBUS) est désactivé par défaut — il faut souder le jumper VBUS au dos de la carte pour l'activer, et seulement si l'alimentation vient de l'USB. Pour les modules et capteurs 5 V, un adaptateur de niveau est requis.
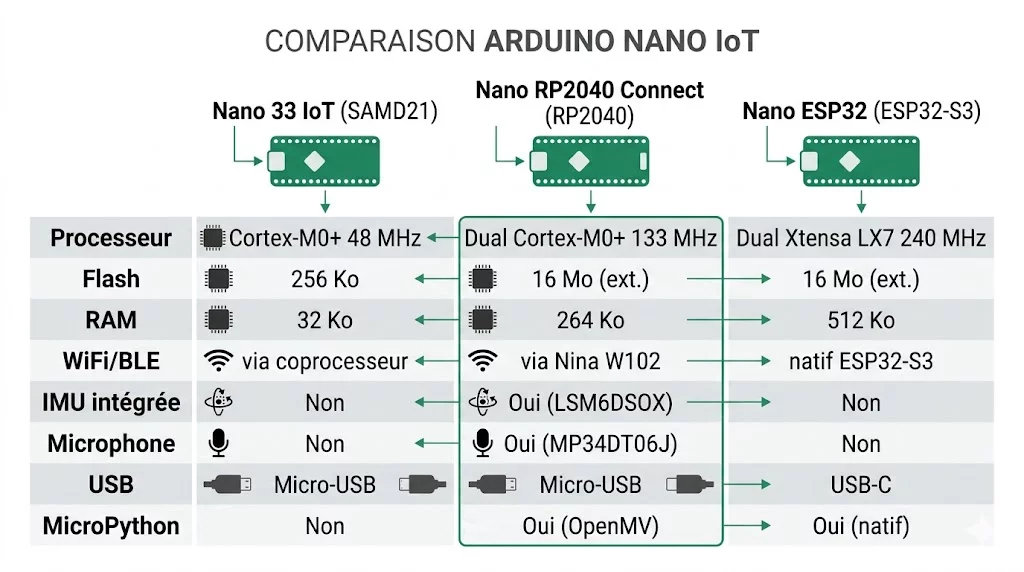
Comparaison entre le Nano 33 IoT, le Nano RP2040 Connect et le Nano ESP32
Le Nano RP2040 Connect brille dans les projets qui tirent parti de ses capteurs embarqués, de son dual-core et de son PIO. Voici les cas d'usage les plus pertinents.
L'IMU LSM6DSOX intègre un core de Machine Learning dédié capable de classer des données inertielles en temps réel : détection de gestes, comptage de pas, reconnaissance de mouvements, détection de chute. Combiné avec le dual-core du RP2040, on peut faire tourner des modèles TinyML (via TensorFlow Lite for Microcontrollers) pour de la reconnaissance vocale, de la détection d'anomalie sonore ou de la classification de vibrations.
Le microphone MEMS MP34DT06JTR capture du son en temps réel via l'interface PDM. On peut implémenter des systèmes de commande vocale simples, des détecteurs de bruit, des analyseurs de spectre ou des déclencheurs sur mots-clés. La bibliothèque PDM d'Arduino simplifie l'acquisition, et le dual-core permet d'analyser le signal sur un cœur pendant que l'autre gère la logique applicative.
Le WiFi via Nina W102 permet de connecter la carte à l'Arduino IoT Cloud en quelques lignes de code. On peut monitorer les données de l'IMU et du microphone en temps réel sur un dashboard, contrôler la LED RGB à distance, ou déclencher des actions sur événement. L'intégration avec l'application mobile Arduino IoT Remote fonctionne parfaitement pour la domotique et le monitoring.
Le format Nano compact (45 × 18 mm, 6 g), l'IMU intégrée et le BLE font de cette carte un bon candidat pour les dispositifs portables : traqueurs d'activité, contrôleurs VR, bracelets connectés. Le core ML de l'IMU réduit la charge processeur pour le suivi de mouvement, ce qui préserve la batterie.
Le PIO du RP2040 permet de piloter des centaines de LED WS2812B (NeoPixels) avec un timing parfait, sans utiliser de librairie bit-banging gourmande en CPU. Il peut aussi implémenter des bus I2S pour l'audio, des protocoles SPI à très haute vitesse, ou n'importe quel protocole série personnalisé. C'est un atout unique que les cartes à base d'ESP32 ou d'AVR ne possèdent pas.
Le Nano RP2040 Connect conserve le brochage standard de la famille Nano (2 × 15 broches, pas de 2,54 mm) avec les connecteurs pré-soudés. On l'enfiche directement sur une plaque de prototypage sans soudure pour le développement, ou sur une carte d'extension à borniers à vis pour un câblage définitif.
Un adaptateur Grove au format Nano facilite la connexion des modules Grove (capteurs, actionneurs, afficheurs) via I²C. Le Nano Motor Carrier d'Arduino permet de piloter des moteurs DC et des servomoteurs directement depuis la carte Nano — idéal pour la robotique compacte.
Attention : les E/S sont en 3,3 V. Le pin VBUS (5 V) est désactivé par défaut (jumper ouvert). Si vous avez besoin du 5 V, il faut souder le jumper au dos de la carte, et uniquement avec une alimentation USB. Les shields conçus pour du 5 V nécessitent un adaptateur de niveau sur les lignes de données. Un câble micro-USB de qualité (données + charge) est indispensable pour la programmation.
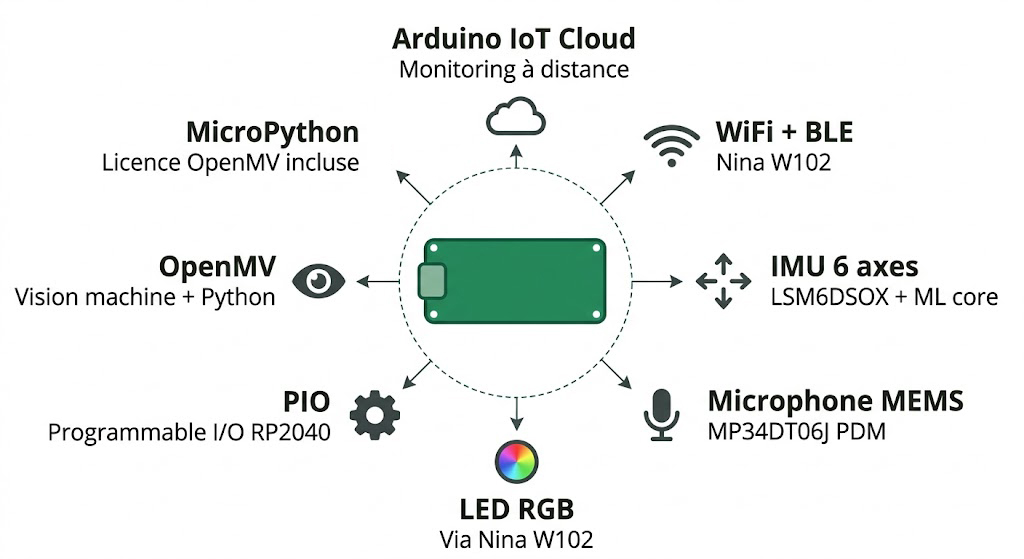
Capteurs embarqués et écosystème de l'Arduino Nano RP2040 Connect
La référence technique complète : pinout détaillé, configuration des bus série, utilisation de l'IMU et du microphone, gestion du WiFi et du BLE, modes d'alimentation, débogage SWD. Chaque fonctionnalité est illustrée par un exemple de code. C'est le document à garder sous la main.
Voir le manuel utilisateur sur docs.arduino.cc
Ce tutoriel officiel explique comment flasher le firmware OpenMV sur le Nano RP2040 Connect, se connecter à l'IDE OpenMV, et exécuter un premier script MicroPython (blink LED). Il couvre aussi la procédure pour revenir au firmware Arduino si nécessaire.
Voir le tutoriel OpenMV sur docs.arduino.cc
Un guide pas à pas pour connecter le Nano RP2040 Connect au Cloud Arduino. Il montre comment lire les données de l'IMU en temps réel sur un dashboard et contrôler la LED RGB depuis l'application mobile. Le tutoriel couvre la configuration du device, la création d'un "Thing", et la construction du dashboard.
Voir le tutoriel IoT Cloud sur docs.arduino.cc
Une collection de scripts MicroPython prêts à l'emploi pour le Nano RP2040 Connect : lecture de l'IMU, capture audio avec le microphone, contrôle de la LED RGB, connexion WiFi, scan BLE. Chaque script est documenté et testable immédiatement via OpenMV ou Thonny.
Voir l'API Python sur docs.arduino.cc
La carte contient deux processeurs. Le RP2040 (Raspberry Pi) est le processeur principal : il exécute votre sketch, gère les GPIO (D0-D13, A0-A3) et le PIO. Le Nina W102 (ESP32 d'u-blox) est le coprocesseur : il gère le WiFi, le BLE, les entrées analogiques A4-A7 et la LED RGB. La communication entre les deux se fait par SPI interne. C'est transparent pour l'utilisateur dans l'IDE Arduino.
Non. Le pin VBUS (5 V) est désactivé par défaut. Pour l'activer, il faut souder le jumper VBUS situé au dos de la carte. Et même ainsi, le 5 V n'est disponible que si la carte est alimentée par USB. Si vous alimentez par Vin, il n'y a pas de 5 V disponible. C'est une mesure de sécurité pour protéger la carte qui fonctionne en 3,3 V.
Le brochage physique est compatible. Cependant, les E/S fonctionnent en 3,3 V et ne sont pas tolérantes au 5 V. Les shields 5 V (type Nano Every ou Nano classique) nécessitent un adaptateur de niveau sur toutes les lignes de données. Les shields déjà en 3,3 V sont directement compatibles.
Le PIO (Programmable I/O) est un système hardware unique au RP2040. Il contient deux blocs de 4 state machines programmables qui exécutent des micro-programmes indépendamment des cœurs principaux. Ça permet d'implémenter n'importe quel protocole série (WS2812B, I2S, protocole propriétaire) avec un timing cycle-exact, sans mobiliser le CPU. C'est un avantage considérable pour les projets qui ont besoin de piloter des LED adressables ou de gérer plusieurs bus simultanément.
Oui, et c'est même l'un des cas d'usage phares de cette carte. L'IMU LSM6DSOX possède un core de Machine Learning intégré dans le silicium, capable de classer des patterns de mouvement (gestes, chute, pas) sans intervention du processeur principal. On peut aussi entraîner des modèles TinyML sur PC et les déployer sur le RP2040 pour des applications plus complexes (reconnaissance vocale, classification de vibrations).
Oui, nativamente via le WiFi du Nina W102. La configuration se fait en quelques étapes dans l'interface Cloud : association de la carte, création d'un "Thing" avec des variables (données IMU, état LED, etc.), et construction d'un dashboard de visualisation. L'application mobile Arduino IoT Remote permet le contrôle depuis un smartphone.
Non. La carte utilise un connecteur micro-USB (USB 1.1). C'est l'une des rares cartes Nano récentes à ne pas avoir fait la transition vers l'USB-C (le Nano ESP32 et le Nano R4 ont déjà migré). Un câble micro-USB de qualité avec données est nécessaire pour la programmation.
L'Arduino Nano RP2040 Connect est la carte Nano la plus complète en termes de capteurs et fonctionnalités embarqués. L'IMU avec core ML et le microphone MEMS sont des atouts qu'aucun autre Nano ne propose — on a un vrai kit de développement IoT et AI dans le format d'un timbre-poste.
Les points forts sont clairs : le dual-core RP2040 offre une vraie puissance de traitement parallèle, le PIO est une fonctionnalité hardware unique et puissante, la combinaison WiFi/BLE + IMU + microphone couvre un spectre d'applications énorme, et le support OpenMV + MicroPython avec licence gratuite facilite l'entrée dans le machine learning et la vision machine.
Les limites à connaître : le port micro-USB fait un peu daté face aux Nano récents en USB-C. Le pin VBUS 5 V désactivé par défaut (jumper à souder) peut déstabiliser les débutants. Les E/S en 3,3 V limitent la compatibilité directe avec les shields et capteurs 5 V. Et le courant par broche (12 mA) est plus limité que sur les Nano à base d'ESP32 (40 mA). Enfin, la carte est positionnée dans le haut de la gamme tarifaire des Nano, ce qui est justifié par l'embarqué mais peut freiner pour des projets simples.
Pour qui veut explorer le machine learning embarqué, l'analyse audio, le suivi de mouvement ou la vision machine avec un Arduino compact et connecté, le Nano RP2040 Connect reste un choix de référence.
Avis expert Lextronic sur l'Arduino Nano RP2040 Connect

Produits associés



