Conçue et fabriquée par Charmed Labs, la caméra Pixy2 V2.3 vous permettra d'apporter très facilement et rapidement une solution de vision à moindre frais à vos microcontrôleurs.
Les caméras vidéos à sortie numérique disponibles sur le marché offrent des possibilités étonnantes. Ainsi associés à un microcontrôleur doté d'un algorithme approprié, ces dernières pourront être utilisées pour détecter pratiquement n'importe quoi dans leur champ de vision.
Toutefois leur utilisation pose généralement des problèmes récurrents. En premier lieu, celui de devoir disposer d'un microcontrôleur assez puissant et rapide pour pouvoir gérer le très grand nombre de données que ces dernières fournissent (pouvant aller jusqu'à plusieurs dizaines de méga-octets par seconde).
Quand bien même vous disposeriez de ce type de microcontrôleur, ce dernier serait alors monopolisé en grande partie pour la gestion de l'algorithme de reconnaissance vidéo, vous laissant alors peu de ressource pour les autres tâches de votre application.
Plus petite et plus puissante que la CMUCAM5 (Pixy), la module Pixy 2 de chez Charmed Labs contourne ces problèmes en vous proposant un capteur prêt à l'emploi pouvant être utilisé (pour des applications ludiques) avec la plupart des microcontrôleurs (performants ou non). Conçu pour pouvoir être pilotée depuis un Arduino®, Raspberry PI, Beagle Bone Black (grâce aux librairies, codes sources et autres API téléchargeables) ou tout autres microcontrôleurs, la caméra Pixy 2 est architecturée sur la base d'un super capteur vidéo Aptina™ MT9M114, 1/4", 1296 x 976 pixels associé à un processeur NXP™ LPC4330 dual core vous permettant ainsi très facilement de suivre des lignes, des objets de couleur ou encore reconnaître des formes par exemple.

L'algorithme programmé dans son microcontrôleur lui permettra de traiter les images provenant du capteur vidéo et de renvoyer uniquement les informations utiles à votre propre microcontrôleur (par exemple: un objet de couleur mauve a été détecté à x = 54 , y = 103).
Cette information est disponible par le biais de plusieurs interfaces: série UART , SPI, I2C , sortie numérique ou sortie analogique.
De ce fait la plupart des microcontrôleurs pourront être facilement interfacés avec Pixy 2. Il sera ainsi possible par exemple de brancher plusieurs Pixy 2 à votre microcontrôleur (par exemple, un robot pourrait être équipé de 4 modules Pixy 2 afin de lui offrir un "champ de vision" sur 360° !).

A ce titre, la Pixy 2 est livrée de base dans une petite boîte en carton avec un câble USB, sa visserie et un petit câble en nappe vous permettant de la relier directement à un Arduino®. Il est également possible d'utiliser la Pixy 2 avec d'autres microcontrôleurs ou sans un microcontrôleur externe en exploitant ses sorties numériques.
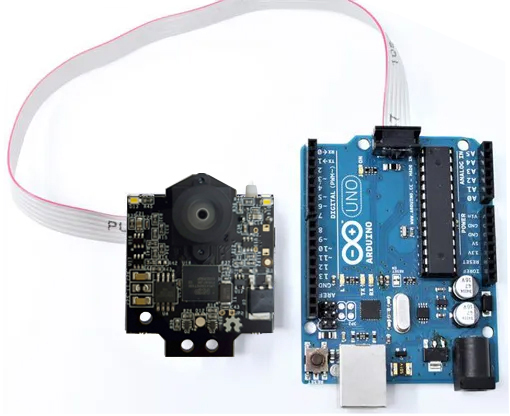
Exemple de raccordement de la Pixy 2 sur une platine Arduino® (non livrée)
Caractéristiques:- Processeur: NXP LPC4330 - 204 MHz - dual core
- RAM: 264 K bytes
- Flash: 2 M bytes
- Capteur vidéo:
Aptina MT9M114 - 1/4" - 1296 x 976 pixels
- Champ de vision de la lentille: 80° horizontal, 40° vertical
- Type de lentille: M12
- 2 Leds blanche
- Consommation: 140 mA typ.
- Alimentation: Via USB (5 V - Câble non livré)
- Sorties: UART serial, SPI, I2C, USB, digital, analog
- Dimensions: 42x 38 x 15 mm
- Poids: 10 g (24 g avec visserie et nappe)
- Version: 2.2
Principe de fonctionnement:La Pixy 2 utilise un algorithme de "filtrage de couleur" sur la base de "teintes" pour détecter des objets. La plupart d'entre nous sont familiers avec les notions RVB (rouge, vert et bleu) pour représenter les couleurs. La Pixy 2 calcule la teinte et la saturation de chaque pixel RGB à partir du capteur vidéo et les utilise en tant que paramètres de filtrage primaire. Si dans la majorité des cas, la teinte d'un objet reste inchangée suite à des changements d'éclairage et d'exposition, ce type de phénomène peut toutefois jouer en défaveur de l'algorithme de filtrage. Pour sa part la Pixy 2 est capable de gérer cette situation avec davantage d'efficacité que les versions précédentes de CMUcam Pixy.
7 signatures de couleurs:La Pixy 2 mémorise jusqu'à 7 signatures de couleurs différentes, ce qui signifie que si vous avez 7 objets différents avec des couleurs uniques, l'algorithme de filtrage de couleur de la Pixy 2 n'aura aucun problème pour les identifier.
Des centaines d'objets détectables:La Pixy 2 peut déceler des centaines d'objets à la fois dans son champ de vision. Pour ce faire elle utilise un algorithme de composants connectés pour déterminer où un objet commence et ou il se termine. Elle compile ensuite les dimensions et l'emplacement de chaque objet et les signale par une de ses interfaces (par exemple via un bus SPI).
") 60 images par seconde:
60 images par seconde:Qu'est-ce que le terme "60 images par seconde" signifie?
En bref, cela signifie que la Pixy 2 est rapide. Cette dernière traite toute une trame d'image 640 x 400 chaque 1/60 ème de seconde (16 millisecondes). Cela signifie que vous obtenez une mise à jour complète de tous les objets détectés toutes les 16 ms. À ce rythme, le suivi de la trajectoire d'une chute d'une balle bondissante est possible.
")
Faites reconnaître des objets à la Pixy 2:
La Pixy 2 est unique parce que vous pouvez lui faire apprendre quels objets elle devra reconnaître. Placez par exemple une balle jaune devant le capteur vidéo de la Pixy 2 et appuyez sur son bouton. Vous désirez qu'elle réagisse à un autre objet d'une autre couleur tel qu'une balle de couleur rouge ? Placez cette nouvelle balle devant le capteur vidéo de la CMUcam5 et appuyez à nouvau sur son bouton... Cette couleur sera alors mémorisée... C'est simple et rapide !
La Pixy 2 peut ainsi apprendre sept signatures de couleurs différentes.
Ce faisant, la Led RGB présente sur la carte de la Pixy 2 fournit des informations concernant quel objet elle regarde. Par exemple, la Led s'allume en orange lorsque une boule orange est placé directement en face de la Pixy 2. Relâchez alors le bouton de la Pixy 2 afin qu'elle génère un modèle statistique des couleurs contenues dans l'objet et qu'elle les stocke en flash. Elle pourra ensuite utiliser ce modèle statistique pour trouver des objets avec des signatures de couleurs similaires dans son champ de vision.

Nous proposons également en option (voir dans en bas de page) une petite tourelle pan/tilt permettant (via 2 mini servomoteurs inclus de donner la possibilité à la caméra Pixy 2 de se déplacer sur les axes X et Y afin qu'elle puisse suivre des objets (voir la vidéo de démo dans la colonne de droite pour plus d'infos).
PixyMon v2 vous permet de voir ce voit que la Pixy 2:PixyMon v2 est une application qui s'exécute sur votre PC ou sur votre Mac. Elle vous permet de voir ce que voit la Pixy 2, soit en tant que vidéo brut ou soit en tant que vidéo transformée. Le logiciel vous permet également de configurer votre Pixy 2, de choisir un port de sortie et de gérer les signatures de couleurs. Le logiciel PixyMon v2 communique avec la Pixy 2 au moyen d'un câble mini-USB standard (non livré - nous proposons un modèle en option dans la colonne de droite).
Le logiciel PixyMon v2 est est idéal pour debugger votre application. Vous pouvez brancher un câble USB à l'arrière de la Pixy 2 et exécuter PixyMon v2 et ensuite voir ce la Pixy 2 voit alors que la Pixy 2 est raccordée à un Arduino® ou à un autre microcontrôleur - pas besoin de débrancher quoi que ce soit. Notez également que le logiciel PixyMon v2 est open source... comme tout le reste !. Il est écrit à l'aide du framework Qt.

 Charmed Labs")

 Charmed Labs")



