Votre panier
Il n'y a plus de produit dans votre panier
















Dont 0,04 € d'eco-participation déjà incluse dans le prix
L'OpenMV N6 est une carte microcontrôleur compacte et basse consommation qui permet de mettre en œuvre facilement des applications de vision industrielle.
L'OpenMV AE3 est une caméra d'intelligence artificielle embarquée aussi petite qu'une pièce de monnaie — 30 × 30 mm, 8 grammes — et capable de faire tourner des modèles de détection d'objets YOLO à 30 FPS tout en dormant à moins de 80 µA en veille profonde. Propulsée par l'Alif Ensemble E3, un SoC dual ARM Cortex-M55 avec deux NPUs Ethos-U55, elle est la première caméra de vision industrielle conçue pour les déploiements sur batterie longue durée. On la programme directement en MicroPython via l'IDE OpenMV — pas de C, pas de compilation croisée, un script Python et c'est parti.
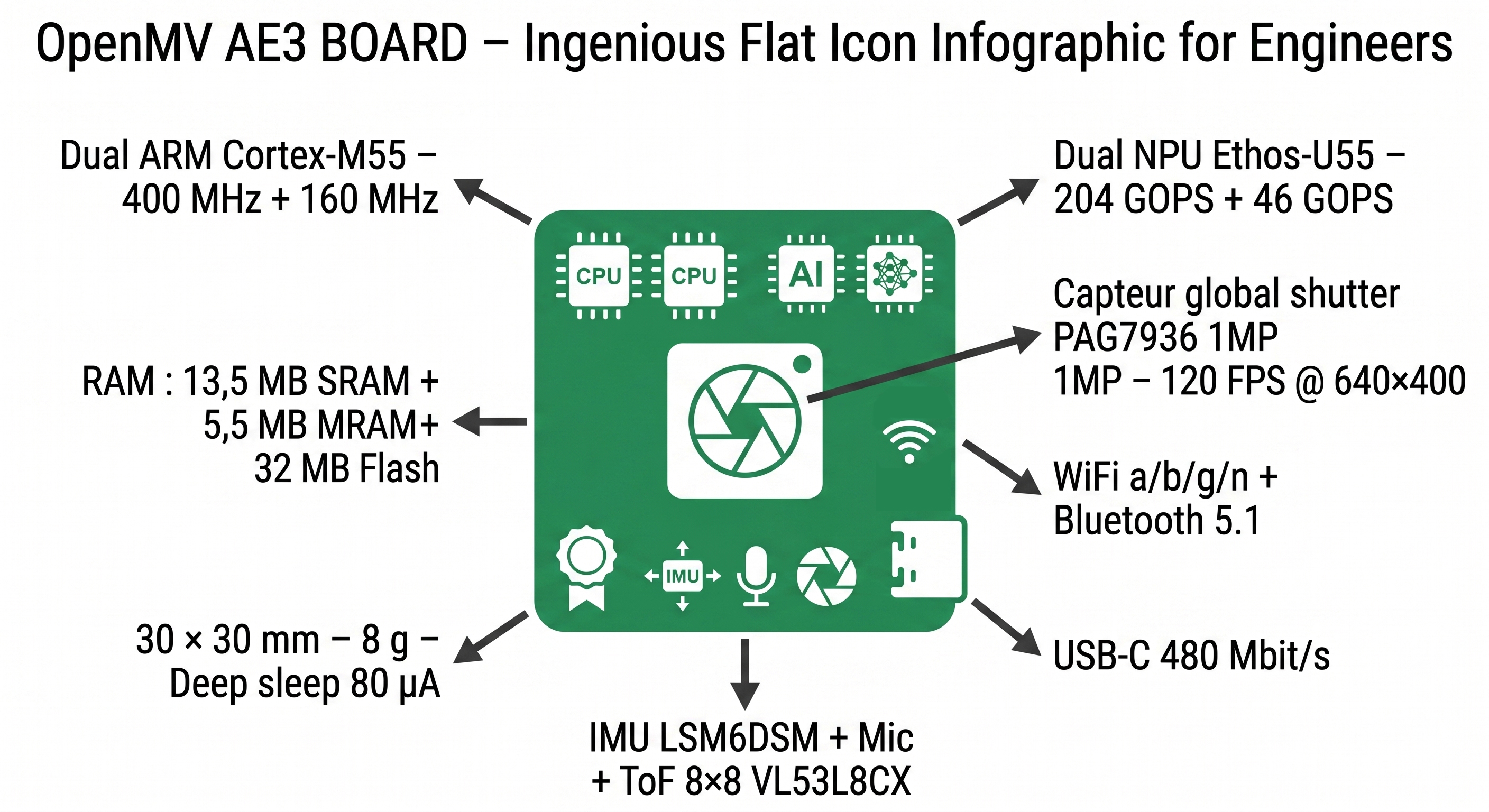
Vue annotée de l'OpenMV AE3 : processeur dual-core, double NPU, capteur global shutter et périphériques intégrés
La promesse de l'OpenMV AE3, c'est de réunir sur 9 cm² tout ce dont on a besoin pour faire de la vision par ordinateur autonome dans le monde réel : caméra, processeur IA, connectivité et capteurs annexes. Il n'y a pas grand-chose à rajouter autour.
Ce qui la distingue vraiment des alternatives du marché, c'est la consommation énergétique. En mode actif pleine puissance, l'AE3 tourne à 50–60 mA sous 5 V — soit à peine 0,25 à 0,3 W. En deep sleep, elle tombe à 80 µA sous 3,3 V. C'est ce qui la rend sérieusement envisageable pour des déploiements sur batterie LiPo ou solaire, dans des applications comme la surveillance faunique, la météorologie agricole ou la sécurité périmétrique. Les autres caméras à capacités comparables consomment souvent deux à dix fois plus.
Côté IA, les deux NPUs Ethos-U55 embarqués offrent respectivement 204 GOPS (cœur HP à 400 MHz) et 46 GOPS (cœur HE à 160 MHz). En pratique, ça veut dire qu'on peut faire tourner une détection YOLO à 30 FPS sur VGA et en parallèle faire de la reconnaissance de commandes vocales — les deux NPUs travaillent simultanément. Le GPU 2D intégré accélère le redimensionnement d'images sans mobiliser les cœurs CPU.
La programmation en MicroPython via OpenMV IDE rend la prise en main accessible même aux développeurs peu familiers de l'embarqué bas niveau. La courbe d'apprentissage est douce : on branche l'AE3 en USB-C, l'IDE la détecte, on charge un script de détection d'objets pré-écrit, et on voit le résultat dans le frame buffer en quelques secondes. OpenMV fournit des dizaines d'exemples couvrant la détection de couleurs, QR codes, AprilTags, visages, objets YOLO, enregistrement vidéo et bien d'autres.
Au cœur de la carte, le SoC Alif Ensemble E3 (référence AE302F80F55D5AE) intègre deux cœurs ARM Cortex-M55 cadencés à 400 MHz (HP) et 160 MHz (HE), tous deux équipés du jeu d'instructions vectoriel Helium 128-bit SIMD (ARM MVE). La mémoire interne totalise 13,5 MB de SRAM, 5,5 MB de MRAM (mémoire non-volatile exécutable directement) et 4 KB de RAM de sauvegarde pour le RTC. Vient s'y ajouter une Flash externe octal de 32 MB (MX25UM25645G, 100 MHz 8-bit DDR, 200 MB/s en lecture). Les deux NPUs Ethos-U55 délivrent 204 GOPS et 46 GOPS d'inférence IA.
Le capteur d'image est un PAG7936 — 1 MP couleur à obturation globale (global shutter). Résolutions : 1280×800 à 30 FPS, 640×400 à 120 FPS, 320×200 à 240 FPS. Format optique 1/4", pixels de 3 µm × 3 µm, SNR 36 dB, dynamique 64 dB, CRA 20°. L'objectif livré est un M8 3,1 mm / F2.3 avec filtre coupe IR 650 nm — champ réel avec le PAG7936 : H 63,8°, V 42,3°, D 72,5°.
La connectivité comprend : USB-C 480 Mbit/s avec filtrage EMI et protection TVS ; WiFi a/b/g/n (11/54/65 Mbit/s) + Bluetooth 5.1 BR/EDR/BLE via le module LBEE5KL1YN (puce CYW43439 Infineon), antenne intégrée + option connecteur U.FL. Les bus d'E/S incluent un bus SPI jusqu'à 50 Mbit/s, deux bus I²C jusqu'à 1 Mbit/s, un bus I3C jusqu'à 10 Mbit/s, un bus CAN jusqu'à 8 Mbit/s, quatre UART asynchrones, un connecteur Qwiic (I²C 3,3 V) et un connecteur B2B (board-to-board) sur la face arrière pour shields et cartes portantes. Les deux ADC 12 bits sont référencés à 1,8 V. Toutes les broches P0–P5 (côté) sortent en 3,3 V, supportent 25 mA chacune et sont toutes capables d'interrompre.
Les périphériques embarqués comprennent : IMU LSM6DSM (accéléromètre + gyroscope, centré sous le module caméra), un microphone numérique (CMM-3526DB-26165) pour la détection sonore et la reconnaissance de commandes vocales, et un capteur ToF 8×8 VL53L8CX (ST) capable de détecter des objets jusqu'à 4 mètres. La carte intègre également une LED RGB pilotable, un bouton utilisateur, un switch de récupération et quatre trous de fixation M1.6. Dimensions : 30 × 30 × 9 mm, poids 8 g, température de fonctionnement −30 °C à +70 °C. SKU : OMV-AE3-V1.
La mise en route de l'OpenMV AE3 ne prend que quelques minutes. On branche la carte via son connecteur USB-C — elle s'identifie comme un port COM virtuel ET comme une clé USB Flash sous Windows, macOS et Linux, sans driver additionnel. On télécharge et installe OpenMV IDE depuis openmv.io/pages/download (gratuit, open-source, cross-platform). L'IDE détecte automatiquement la carte et propose une mise à jour du firmware si nécessaire.
L'IDE intègre un éditeur Python avec coloration syntaxique, un terminal série, un visualiseur du buffer de trame en temps réel et un histogramme. Les exemples sont accessibles directement depuis le menu "Exemples" : détection de couleurs, tracking d'objets, lecture QR/code-barres, AprilTags, détection de visages avec Haar cascades, inférence de modèles TensorFlow Lite et modèles Edge Impulse. Pour les modèles YOLO, OpenMV fournit un pipeline de déploiement complet via Edge Impulse ou l'outil de conversion OpenMV.
Pour les projets en production, le script Python est stocké dans la Flash interne ou sur une carte µSD (via les connexions disponibles) et s'exécute automatiquement au démarrage. Le switch de récupération en face avant permet de reflasher le bootloader si nécessaire sans démontage. Un démarrage en deep sleep avec réveil sur le bouton utilisateur, un événement RTC ou une broche GPIO s'implémente en quelques lignes de code. Le temps de boot jusqu'au premier résultat d'inférence est d'environ 1,5 seconde en mode autonome.
C'est le cas d'usage emblématique de l'AE3. Grâce à sa consommation de 250–300 mW en pleine activité et à son deep sleep à 80 µA, elle peut fonctionner des semaines sur une batterie compacte. Un système de surveillance faunique, un capteur de présence intelligent sur panneau solaire, un compteur de passage autonome : l'AE3 fait tourner YOLO à 30 FPS puis plonge en veille entre les événements, sans aucun PC ou SBC hôte nécessaire.
Le capteur global shutter du PAG7936 élimine le rolling shutter artifact sur les lignes de production rapides. Les 120 FPS en 640×400 permettent la capture sans flou de composants qui défilent sur convoyeur. Les algorithmes de détection de défauts, de lecture de marquages Data Matrix ou QR, et de vérification de présence tournent nativement en MicroPython avec les bibliothèques OpenMV. L'interface CAN jusqu'à 8 Mbit/s et les UART permettent l'intégration directe avec des automates industriels.
Le capteur ToF 8×8 VL53L8CX détecte les obstacles jusqu'à 4 mètres — utile pour l'évitement de collision ou le suivi de sol sur un drone. L'IMU LSM6DSM fournit des données de stabilisation directement accessibles via MicroPython. La légèreté (8 g) et la compacité (30 mm de côté) en font un choix naturel pour les nano-drones ou les rovers de recherche.
Le microphone embarqué associé aux NPUs permet de combiner détection visuelle et reconnaissance de commandes vocales dans le même script Python. Un système de surveillance peut ainsi déclencher l'enregistrement vidéo à la fois sur détection de mouvement visuel ET sur détection d'un son anormal — les deux traitements tournant en parallèle sur les deux NPUs.
MicroPython et OpenMV IDE forment un environnement d'apprentissage progressif : on commence par allumer la LED RGB, on passe à la capture d'image, puis à la détection de couleurs, et finalement à l'entraînement et au déploiement d'un modèle YOLO personnalisé — tout ça sans changer de langage. Le connecteur Qwiic permet d'ajouter facilement des capteurs environnementaux ou des écrans sans câblage.
Le WiFi et le Bluetooth 5.1 intégrés permettent de transmettre des résultats d'inférence directement vers un serveur MQTT, un broker Home Assistant ou une application mobile. On peut envoyer une alerte JSON quand un objet est détecté, diffuser un flux MJPEG en WiFi, ou synchroniser les données de l'IMU via BLE — le tout depuis un seul script Python, sans shield additionnel.
L'OpenMV AE3 est une carte autonome à part entière : elle n'a pas besoin d'une carte hôte pour fonctionner. Elle peut cependant communiquer avec des microcontrôleurs externes via UART, I²C, SPI ou CAN. Le protocole RPC (Remote Procedure Call) d'OpenMV permet de l'utiliser comme coprocesseur de vision depuis n'importe quel MCU hôte.
L'écosystème OpenMV propose des shields dédiés disponibles chez Lextronic (dans la gamme OpenMV) : shields LCD pour affichage local, shields servomoteurs, shields prototypage, et bien d'autres. Le connecteur B2B (board-to-board) en face arrière permet la création de cartes portantes sur mesure pour les applications OEM.
Les objectifs sont interchangeables grâce au filetage M8 : grand angle, téléobjectif ×4, infrarouge nuit — tous compatibles. D'autres capteurs d'image peuvent être utilisés en lieu et place du capteur PAG7936 livré. OpenMV propose également des capteurs alternatives comme le module caméra thermique FLIR Lepton et le capteur événementiel Prophesee GenX320.
L'ensemble du firmware et des bibliothèques est open-source sur GitHub (github.com/openmv). La communauté est active sur les forums officiels forums.openmv.io. Les bibliothèques Python couvrent la vision classique (filtres, détection de contours, HOG) comme les algorithmes modernes (TensorFlow Lite, Edge Impulse, Haarcascades). NumPy et SciPy sont disponibles directement depuis MicroPython sur l'AE3.
L'OpenMV AE3 fonctionne en totale autonomie, mais elle peut également agir comme coprocesseur de vision pour des cartes hôtes. Attention cependant : toutes les broches I/O de l'AE3 sont en logique 3,3 V et ne tolèrent PAS le 5 V. Une connexion directe avec un microcontrôleur 5 V comme l'Arduino Mega provoquerait des dommages irréversibles.
Les cartes Raspberry Pi (GPIO 3,3 V natif) sont directement compatibles avec l'AE3 via UART ou I²C, sans adaptateur de niveaux. Les cartes Teensy 3.x et 4.x (3,3 V) sont également compatibles directement. Les cartes Arduino UNO et Mega (5 V) nécessitent impérativement l'insertion d'un convertisseur de niveaux logiques entre l'hôte et l'AE3 pour chaque broche de communication — sans quoi la carte risque d'être endommagée.
La bibliothèque RPC OpenMV (disponible sur GitHub) simplifie le dialogue entre l'AE3 et n'importe quel MCU hôte : l'AE3 exécute les algorithmes de vision, le MCU hôte traite les résultats et commande les actionneurs. La communication se fait via UART, I²C ou SPI.
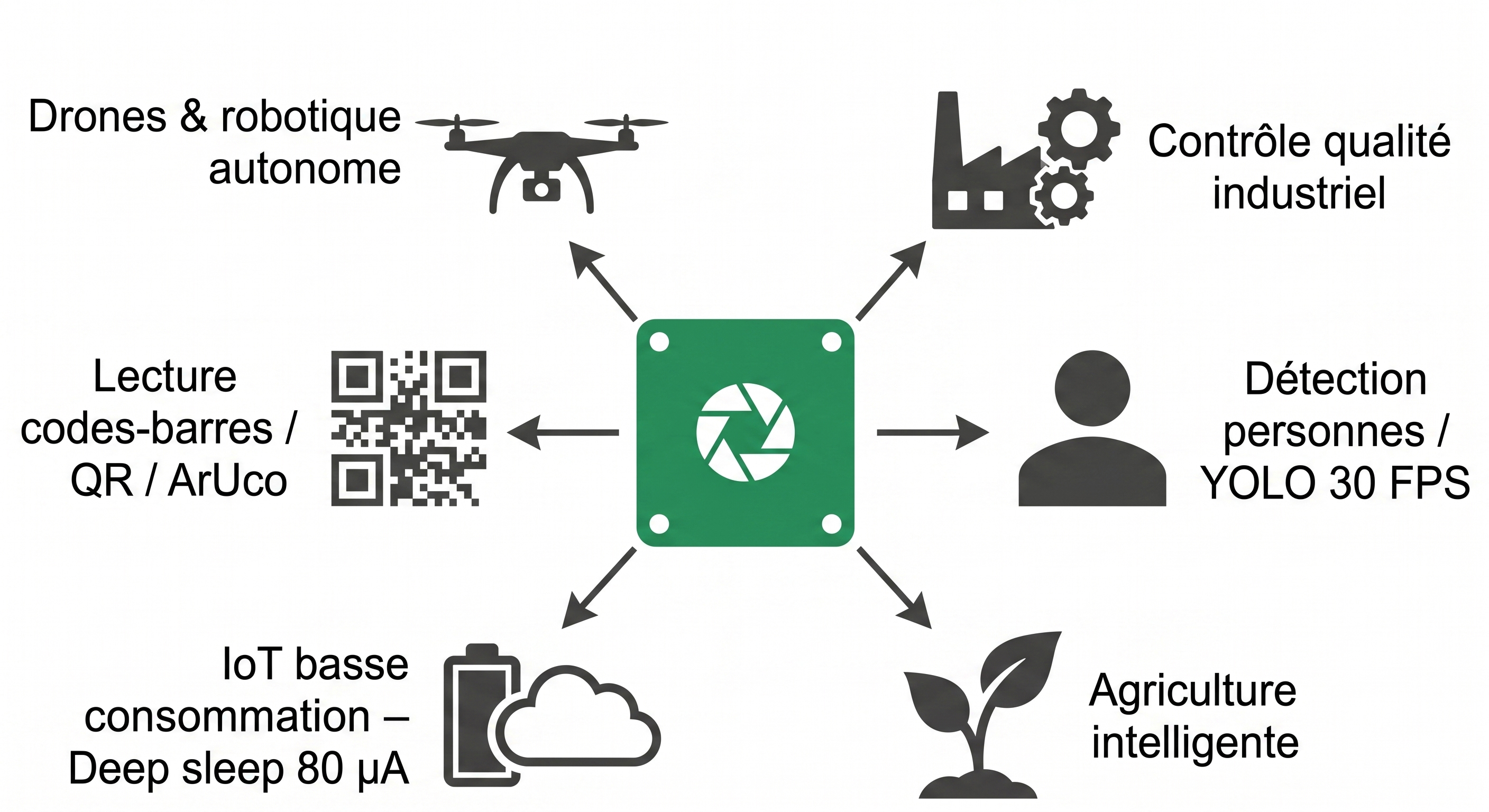
Principaux cas d'usage de l'OpenMV AE3 : vision autonome, robotique, contrôle industriel, IoT basse consommation
La documentation officielle OpenMV propose un tutoriel structuré en dix chapitres : présentation générale, installation logicielle, configuration matérielle, tour de l'IDE, structure d'un script, gestion des I/O, architecture système, utilisation de NumPy/SciPy, déploiement en production, et ressources complémentaires. C'est le point de départ recommandé pour tout nouveau venu sur la plateforme, quelle que soit son expérience en Python.
Voir le tutoriel officiel OpenMV sur docs.openmv.io
La page de référence rapide de l'AE3 dans la documentation officielle détaille l'ensemble du brochage (P0–P14), les configurations de bus (SPI, I²C, I3C, UART, CAN, ADC, PWM), les périphériques intégrés (LED RGB, bouton, capteur, NPU, IMU, micro, ToF, WiFi, Bluetooth), le fonctionnement du RTC et du deep sleep, et le mode récupération/debug JTAG. Une référence indispensable pour toute intégration avancée.
Voir la référence technique AE3 sur docs.openmv.io
Le dépôt GitHub officiel du projet OpenMV contient le firmware complet (open-source), la bibliothèque Python de traitement d'image, les exemples classés par catégorie (détection de couleurs, QR codes, AprilTags, YOLO, MJPEG streaming, RPC…), les outils de calibration et la bibliothèque RPC pour Arduino. C'est ici qu'on trouve les derniers exemples pour l'AE3 et les modèles de détection pré-entraînés.
Voir le dépôt GitHub openmv/openmv
Avec l'Arduino Mega (5 V), la réponse est clairement non — le connecter directement endommagerait l'AE3 car ses broches ne tolèrent que 3,3 V. Avec l'Arduino UNO (qui fonctionne à 5 V mais peut communiquer en 3,3 V avec précautions), il faut systématiquement intercaler un convertisseur de niveaux logiques sur chaque broche de communication (UART, SPI, I²C). Les cartes Raspberry Pi, micro:bit et Teensy 3.x/4.x (logique 3,3 V native) sont compatibles directement.
L'AE3 représente une rupture générationnelle : deux NPUs dédiés à l'IA (absents sur H7 et RT1062), un capteur global shutter (vs rolling shutter sur H7), une consommation en veille 10 à 100 fois plus faible, le WiFi et BT 5.1 intégrés (option sur H7 via shield), un ToF et un micro embarqués. Le H7 reste pertinent pour les usages pédagogiques et les projets sans contrainte d'énergie ; l'AE3 s'impose pour les déploiements IA autonomes sur batterie.
Oui, c'est précisément son mode nominal en production. Le script MicroPython est stocké dans la mémoire interne et s'exécute automatiquement au démarrage. La carte peut envoyer ses résultats par WiFi, MQTT, BLE ou UART sans aucun PC connecté. Le temps de démarrage jusqu'au premier résultat d'inférence est d'environ 1,5 seconde en mode autonome.
L'AE3 exécute les modèles TensorFlow Lite et les modèles optimisés pour les NPUs Ethos-U55 (format .tflite compilé avec le Vela compiler d'ARM). OpenMV et Edge Impulse proposent des pipelines d'entraînement et de déploiement clés en main pour YOLO (détection d'objets), classificateurs d'images et modèles audio. Pour la vision classique sans modèle IA, les algorithmes OpenMV (HOG, Haar, tracking de couleurs, QR/Aztec/Data Matrix) sont intégrés nativement.
Oui. L'objectif livré est un M8 3,1 mm / F2.3 standard. Tout objectif au format M8 est compatible : grand angle, téléobjectif, infrarouge nuit, fish-eye. OpenMV vend plusieurs objectifs optionnels, tous disponibles dans la gamme Lextronic. Le diamètre du cercle image maximal supporté par le PAG7936 est supérieur à 6,8 mm.
Le connecteur Qwiic en face avant expose directement le bus I²C en 3,3 V avec l'alimentation intégrée. On branche n'importe quel capteur Qwiic (SparkFun, Adafruit STEMMA QT) directement avec un câble Qwiic — sans soudure, sans résistance de pull-up à ajouter. Le code MicroPython accède au bus via la bibliothèque standard `machine.I2C`.
Ça dépend fortement du duty cycle. En deep sleep avec réveil toutes les 10 secondes pour 1 seconde d'inférence (50 mA actif, 80 µA veille), la consommation moyenne est d'environ 5,7 mA — ce qui donne environ 35 heures sur une batterie LiPo de 200 mAh. Avec un réveil toutes les minutes, on descend à environ 0,9 mA et plus de 9 jours d'autonomie. Pour des intervalles encore plus longs (surveillance faunique), plusieurs semaines sont atteignables avec une LiPo de 1 Ah. Ces informations sont données à titre indicatif et peuvent varier en fonction de l'usage de la caméra.
Oui. Elle peut enregistrer en format MJPEG et GIF directement via MicroPython. Pour le stockage, il est possible d'utiliser un support externe via les interfaces disponibles. Le streaming vidéo MJPEG via WiFi est également possible en quelques lignes de code, via un serveur HTTP embarqué MicroPython.
L'OpenMV AE3 et l'OpenMV N6 sont les deux nouvelles caméras IA de la gamme OPENMV — même capteur PAG7936 1 MP global shutter, même logiciel MicroPython, même IDE. Le reste diverge franchement selon le besoin.
Le N6 embarque un STM32N657 Cortex-M55 cadencé à 800 MHz avec un NPU Neural-ART à 1 GHz et 600 GOPS — soit environ trois fois la puissance d'inférence brute de l'AE3 (250 GOPS combinés). Il dispose de 64 MB de SDRAM externe (800 MB/s), d'un ISP supportant des capteurs jusqu'à 5 MP, d'un encodeur H.264 hardware (enregistrement MP4 sur carte µSD) et d'un port Ethernet Gigabit via ses pads dédiés. Il y a aussi 18 broches I/O, une entrée VIN, un chargeur LiPo intégré et un port µSD. Pour des applications qui demandent des modèles lourds, du streaming vidéo encodé, ou une connexion réseau filaire, le N6 est clairement au-dessus.
En contrepartie, il consomme 180 mA sous 5 V en pleine charge — soit deux à trois fois plus que l'AE3 (50–60 mA). Son deep sleep descend à environ 1 mA, contre 80 µA pour l'AE3. Sur une batterie compacte, cette différence change radicalement les calculs d'autonomie. L'AE3 est aussi nettement plus petite : 30 × 30 mm contre le format plus traditionnel du N6, et pèse 8 g. Elle intègre en revanche des périphériques absents du N6 : un capteur ToF 8×8 VL53L8CX (jusqu'à 4 m), un IMU LSM6DSM et un microphone — sans aucun shield additionnel. Le N6 possède lui aussi un IMU et un micro, mais pas de ToF.
En résumé : l'AE3 est taillée pour les déploiements autonomes longue durée sur batterie, les nano-drones, la surveillance embarquée et tout ce qui contraint le volume et l'énergie. Le N6 est le bon choix quand on a besoin de modèles IA plus lourds, d'enregistrement vidéo encodé, d'Ethernet, d'un maximum de GPIO ou d'une puissance de traitement image supérieure — avec une alimentation externe disponible.

Produits associés