Votre panier
Il n'y a plus de produit dans votre panier 0 Voir le panier / Générer un devis / Vide
Connexion
Maxi actionneur linéaire avec servomoteur




ACRM00195
Disponible 22,80 € TTC
19,00 € HT
Dont 0,02 € d'eco-participation déjà incluse dans le prix
Livré en kit cet ensemble mécanique vous permettra de réaliser un actionneur linéaire à grande course à partir d'un mini servomoteur (livré). Ce dernier est idéalement conçu pour pousser ou tirer un dispositif externe dans le cadre de projets pédagogiques pour les écoles, les lycées, les collèges, STEM... (comme par exemple la réalisation d'une maquette de portail coulissant).
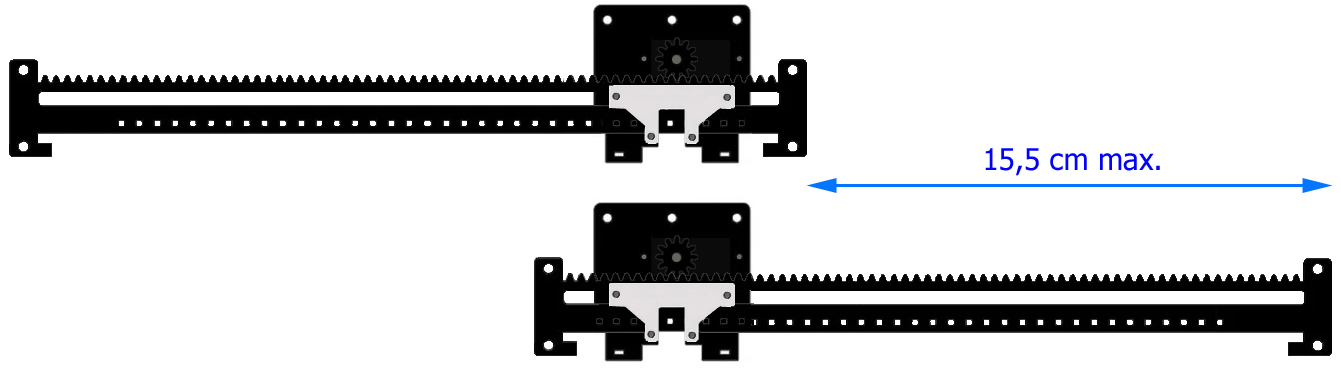
L'actionneur se compose d'une crémaillère capable de se déplacer latéralement de droite à gauche sous l'action du fonctionnement d'un servomoteur à rotation continue avec une course maximale de 15,5 cm. Ce servomoteur pourra être très facilement piloté par un microcontrôleur externe (non livré) de type Arduino, PIC, Raspberry Pi Pico, etc...
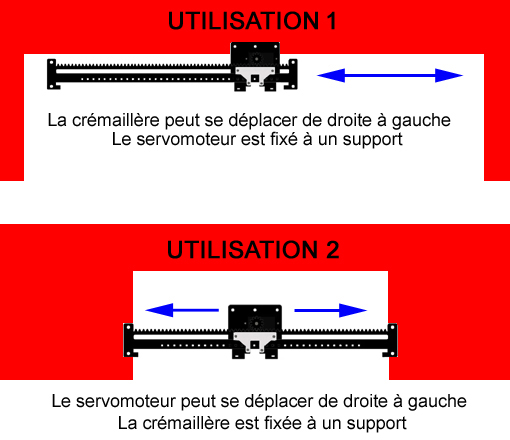
De part la conception de l'actionneur linéaire, il est possible de l'utiliser de 2 façon différentes. Soit avec une crémaillère mobile (dans ce cas le support du servomoteur devra être fixé sur un support fixe). Soit avec la partie servomoteur (dans ce cas les 2 extrémités de la crémaillère devront être fixés sur un support fixe.
Un emplacement sur l'actionneur permet également de recevoir une platine électronique optionnelle destinée à gérer 2 contacts de fin de course utilisés pour repérer les positions limites droite et gauche de la crémaillère.
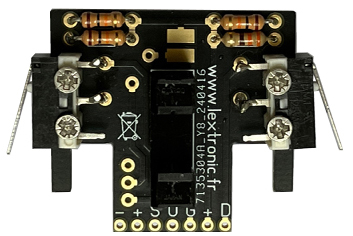
La platine électronique optionnelle intègre également une fourche optique conçue pour exploiter la présence de trous de repérage présents tout le long de la crémaillère. En récupérant le signal de cette fourche optique et en sachant que les trous de repérage sont espacés tous les 5 mm, votre microcontrôleur pourra très facilement asservir la position de la crémaillère. Nous proposons cette platine au bas de la page si vous désirez équiper l'actionneur de celle-ci.
L'assemblage de l'actionneur linéaire s'effectue très simplement et rapidement à l'aide d'un simple tournevis cruciforme miniature de type PH0 (non livré).
La base support principale de l'actionneur dispose de 3 trous de fixation de diamètre 3 mm. L'emplacement et la disposition de ces trous rend sa fixation compatible avec les profilés de la gamme MakerBeam.
La crémaillère possède 2 trous de diamètre 3 mm à chaque extrémités qui vous permettrons de la fixer au dispositif qu'elle devra pousser ou tirer.
Le servomoteur livré avec l'actionneur linéaire est un modèle à rotation continue de type FT90MR doté de pignons en métal lui assurant un couple élevé (jusqu'à 2,3 Kg.cm) et une usure réduite. 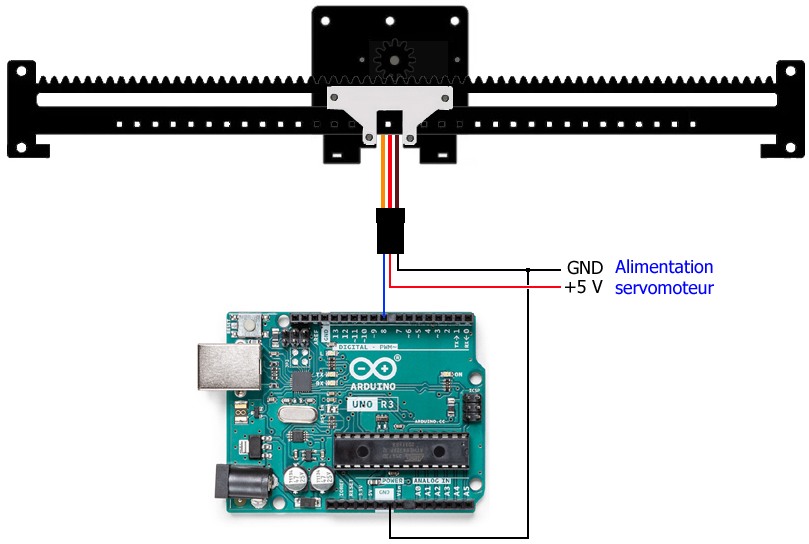
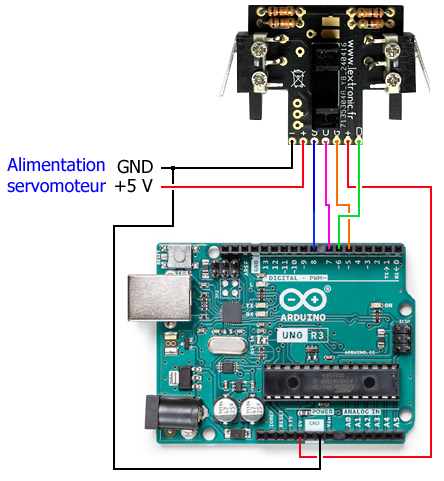
L'actionneur est livré avec 2 exemples de pilotage par une carte Arduino. Le premier exemple concerne le pilotage de l'actionneur linéaire seul directement par la carte Arduino.
Le second programme s'apparente à une petite démo technique permettant de piloter l'actionneur linéaire par une carte Arduino en association avec la petite platine électronique optionnelle de l'actionneur linéaire. Ce programme va déplacer successivement la crémaillère de l'actionneur linéaire sur plusieurs positions en ayant recours à 3 fonctions spécialement crées pour l'occasion.
- La première fonction permet de faire revenir automatiquement la crémaillère complètement à gauche jusqu'au premier capteur de fin de course. Vous pouvez déterminer la vitesse avec laquelle la crémaillère se déplacera durant cette manœuvre.
- La seconde fonction permet de faire revenir automatiquement la crémaillère complètement à droite jusqu'au deuxième capteur de fin de course. Vous pouvez déterminer la vitesse avec laquelle la crémaillère se déplacera durant cette manœuvre.
- La troisième fonction permet de demander à la crémaillère de se déplacer jusqu'à une des 32 positions définies par les 32 trous présents sur celle-ci et d'arrêter de se déplacer une fois quelle à atteint cette position. Vous pouvez déterminer la vitesse avec laquelle la crémaillère se déplacera durant cette manœuvre.
Caractéristiques générale de l'actionneur linéaire :
- Dimensions de la base principale : 46 x 48 mm (épaisseur 7 mm)
- Dimensions de la crémaillère 39 x 2,75 cm (épaisseur 5 mm)
- Course maximale exploitable de la crémaillère: 15,5 cm
- Matériaux: Plastique acrylique de couleur noire
- Mini servomoteur à rotation continue de type FT90MR
Caractéristiques du servomoteur :
- Alimentation: de 4,8 Vcc à 6 Vcc
- Consommations:
- A l'arrêt: 5 mA (4,8Vcc) à 6 mA (6Vcc)
- A vide: 120 mA (4,8Vcc) à 150 mA (6Vcc)
- Bloqué: 800 mA (4,8Vccc) à 100 mA (6Vcc)
- Rotation: 360° sans butée (rotation continue)
-Pignons en métal
- Rapport de réduction: 1/416
- Axe: 3,9 mm (20 dents) avec trou central 2 mm
- Vitesse: 80 tr/min (4,8 Vcc) à 100 tr/min (6 Vcc)
- Couple: 1,89 kg.cm (4,8 Vcc) à 2,3 kg.cm (6 Vcc)
- Connexion: 3 fils 25 cm: marron (mise à la terre) - rouge (+) - orange (signal)
- Dimensions (hors tout): 23,2 x 12,5 x 25,25 mm
- Poids: 13,5 g
Aucun avis
Il est nécessaire d'être connecté pour laisser un avis
Produits associés




Actionneurs linéaires à servomoteur
Platine d'asservissement optionnelle pour actionneur linéaire
14,10 € TTC - 11,75 € HT
Appuyez pour zoomer