Votre panier
Il n'y a plus de produit dans votre panier
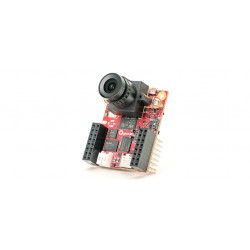
Le projet OpenMV a pour but de pouvoir mettre à disposition du plus grand nombre un système de vision industrielle avec Python intelligent, très performant et économique capable entre autre d'effectuer de la reconnaissance de couleur, de la reconnaissance faciale, du suivi de pupille, de la détection de mouvements, du suivi d'objets colorés, de l'enregistrement vidéos au format GIF/MJPEG, du décodage de QR code... et bien plus encore. L'objectif du projet OpenMV est de rapprocher les algorithmes de vision industrielle des créateurs et des amateurs. L'équipe dernière le projet OpenMV a effectué pour vous le travail difficile et fastidieux des algorithmes, vous laissant ainsi plus de temps pour votre créativité ! Ainsi L'OpenMV Cam s'apparente à une sorte d'Arduino super puissant avec une caméra intégrée que vous programmez en Python. Lextronic est le distributeur officiel pour la France de la gamme de modules OpenMV.