Votre panier
Il n'y a plus de produit dans votre panier

Ce moteur pas à pas 5 VDC est livré avec un mini module drivers basé sur un contrôleur CMS ULN2003. Il pourra être commandé par une plateforme Arduino® ou compatible.
Ce module Drivers à base d'un ULN2003 livré avec un moteur pas-à-pas 5Vcc se raccordera facilement sur 4 entrées digitales d'un module Arduino ou compatible (non livrés) et vous permettra de réaliser des applications robotique, automate, etc...
Caractéristiques :
Exemple de raccordement et code source: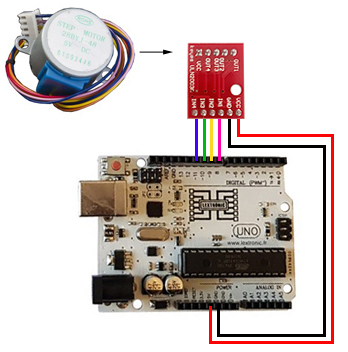
**** DEBUT DE CODE ****
// Déclaration des broches du module Drivers sur les GPIO de l'Arduino
int motorIn1 = 11; // IN1 fil rose sur GPIO 11 de l'Arduino
int motorIn2 = 10; // IN2 fil jaune sur GPIO 10 de l'Arduino
int motorIn3 = 9; // IN3 fil vert sur GPIO 9 de l'Arduino
int motorIn4 = 8; // IN4 fil bleu sur GPIO 8 de l'Arduino
// Déclaration des variable pour le moteur
int motorSpeed = 1200; // Vitesse
int count = 0; // Compteur de pas initialiser à 0
int countsperrev = 512; // Variable pas max par révolution
int lookup[8] = {B01000, B01100, B00100, B00110, B00010, B00011, B00001, B01001};
void setup()
{
// Déclaration des branchements du moteur en tant que sortie
pinMode(motorIn1, OUTPUT);
pinMode(motorIn2, OUTPUT);
pinMode(motorIn3, OUTPUT);
pinMode(motorIn4, OUTPUT);
Serial.begin(9600);
}
void loop()
{ if(count < countsperrev )
clockwise();
else if (count == countsperrev * 2)
count = 0;
else anticlockwise();
count++;
}
void anticlockwise()
{
for(int i = 0; i < 8; i++)
{
setOutput(i);
delayMicroseconds(motorSpeed);
}
}
void clockwise()
{
for(int i = 7; i >= 0;
i--)
{
setOutput(i);
delayMicroseconds(motorSpeed);
}
}
void setOutput(int out)
{
digitalWrite(motorIn1, bitRead(lookup[out], 0));
digitalWrite(motorIn2, bitRead(lookup[out], 1));
digitalWrite(motorIn3, bitRead(lookup[out], 2));
digitalWrite(motorIn4, bitRead(lookup[out], 3));
}
**** FIN DE CODE ****
Produits associés
